Environment Design for Inverse Reinforcement Learning
{kind=link}
Abstract
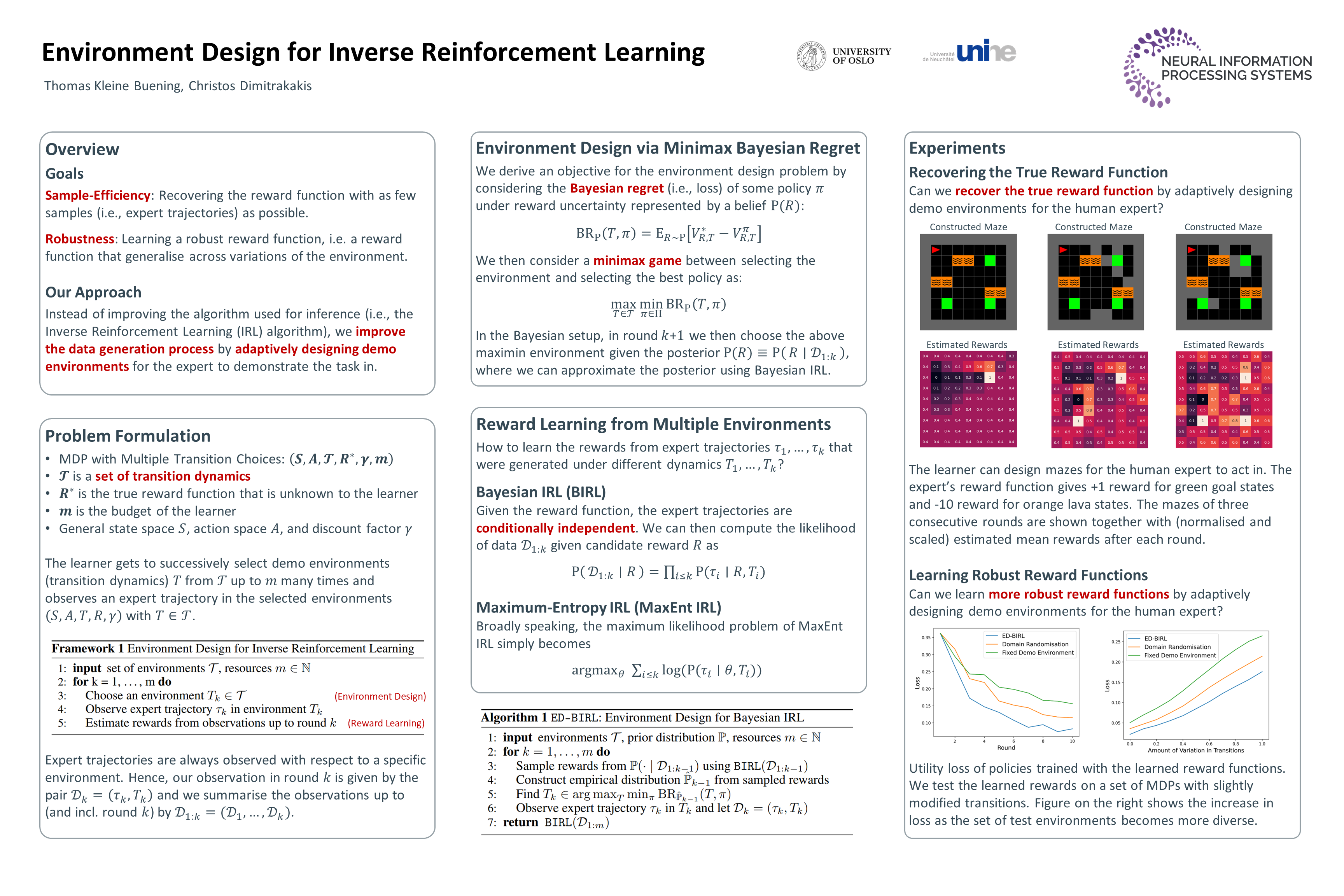
The task of learning a reward function from expert demonstrations suffers from high sample complexity as well as inherent limitations to what can be learned from demonstrations in a given environment. As the samples used for reward learning require human input, which is generally expensive, much effort has been dedicated towards designing more sample-efficient algorithms. Moreover, even with abundant data, current methods can still fail to learn insightful reward functions that are robust to minor changes in the environment dynamics. We approach these challenges differently than prior work by improving the sample-efficiency as well as the robustness of learned rewards through adaptively designing a sequence of demonstration environments for the expert to act in. We formalise a framework for this environment design process, in which learner and expert repeatedly interact, and construct algorithms that actively seek information about the rewards by carefully curating environments for the human to demonstrate the task in.