Safe Real-World Autonomous Driving by Learning to Predict and Plan with a Mixture of Experts
{kind=link}
Abstract
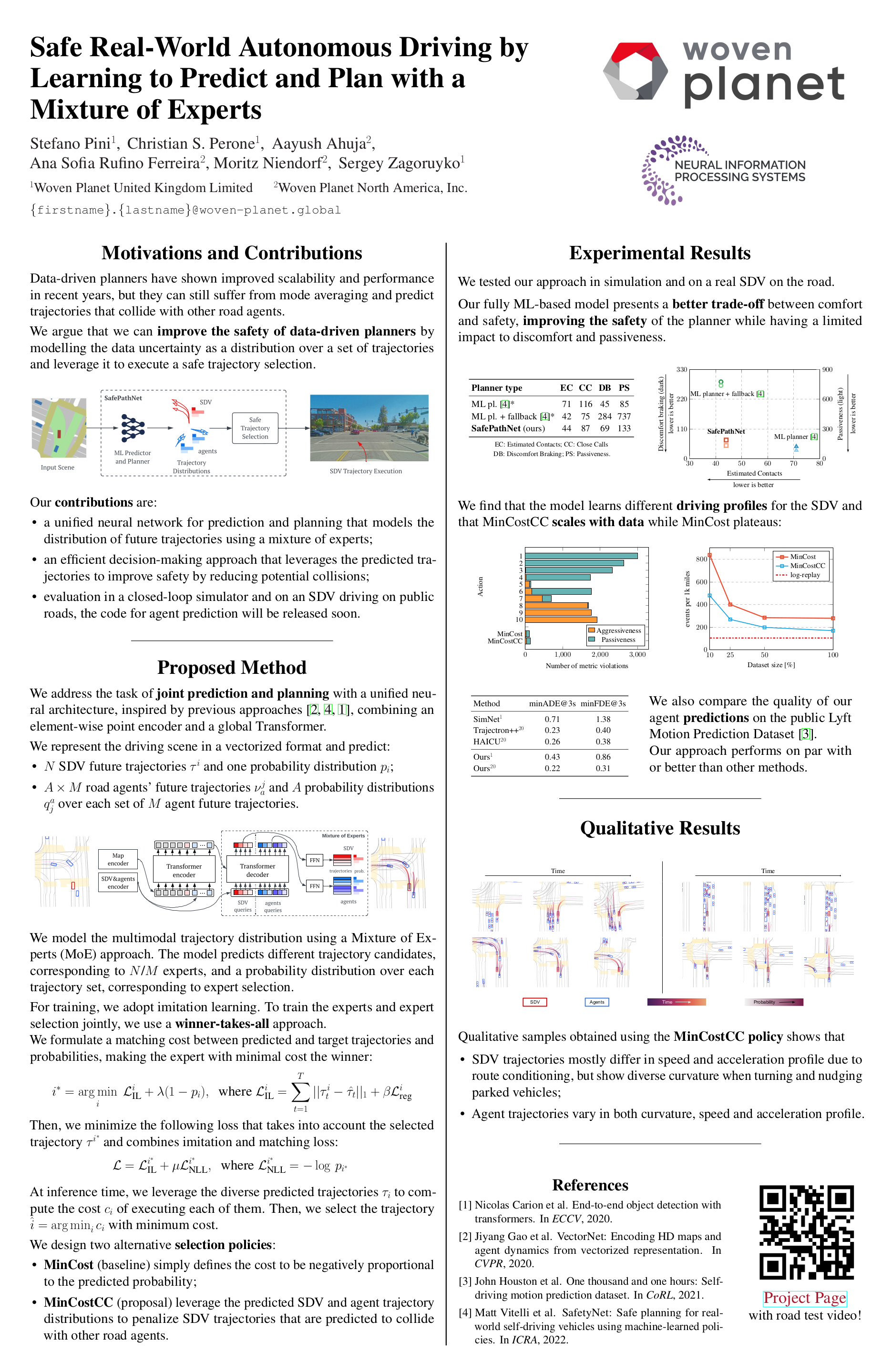
The goal of autonomous vehicles is to navigate public roads safely and comfortably. To enforce safety, traditional planning approaches rely on handcrafted rules to generate trajectories. Machine learning-based systems, on the other hand, scale with data and are able to learn more complex behaviors. However, they often ignore that agents and self-driving vehicle trajectory distributions can be leveraged to improve safety. In this paper, we propose modeling a distribution over multiple future trajectories for both the self-driving vehicle and other road agents, using a unified neural network architecture for prediction and planning. During inference, we select the planning trajectory that minimizes a cost taking into account safety and the predicted probabilities. Our approach does not depend on any rule-based planners for trajectory generation or optimization, improves with more training data and is simple to implement. We extensively evaluate our method through a realistic simulator and show that the predicted trajectory distribution corresponds to different driving profiles. We also successfully deploy it on a self-driving vehicle on urban public roads, confirming that it drives safely without compromising comfort. The code for training and testing our model on a public prediction dataset and the video of the road test are available at https://woven.mobi/safepathnet.