CAMEL: Learning Cost-maps Made Easy for Off-road Driving
{kind=link}
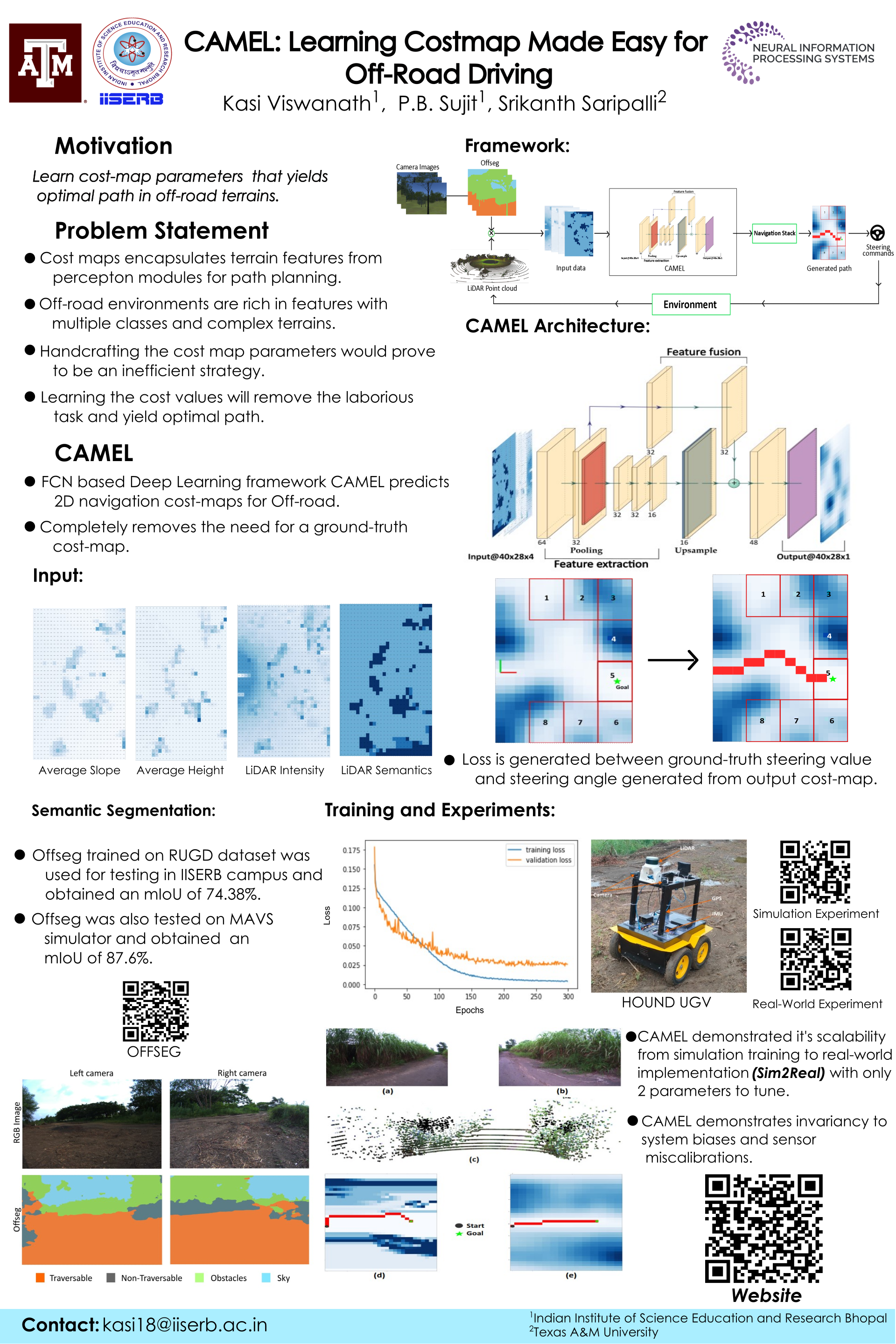
Abstract
Cost-maps are used by robotic vehicles to plan collision-free paths. The cost associated with each cell in the map represents the sensed environment information which is often determined manually after several trial-and-error efforts. In off-road environments, due to the presence of several types of features, it is challenging to handcraft the cost values associated with each feature. Moreover, different handcrafted cost values can lead to different paths for the same environment which is not desirable. In this paper, we address the problem of learning the cost-map values from the sensed environment for robust vehicle path planning. We propose a novel framework called as CAMEL using deep learning approach that learns the parameters through demonstrations yielding an adaptive and robust cost-map for path planning. CAMEL has been trained on multi-modal datasets such as RELLIS-3D. The evaluation of CAMEL is carried out on an off-road scene simulator (MAVS) and on field data from IISER-B campus. We also perform real-world implementation of CAMEL on a ground rover. The results shows flexible and robust motion of the vehicle without collisions in unstructured terrains.