Provably Efficient Causal Model-Based Reinforcement Learning for Environment-Agnostic Generalization
{kind=link}
Abstract
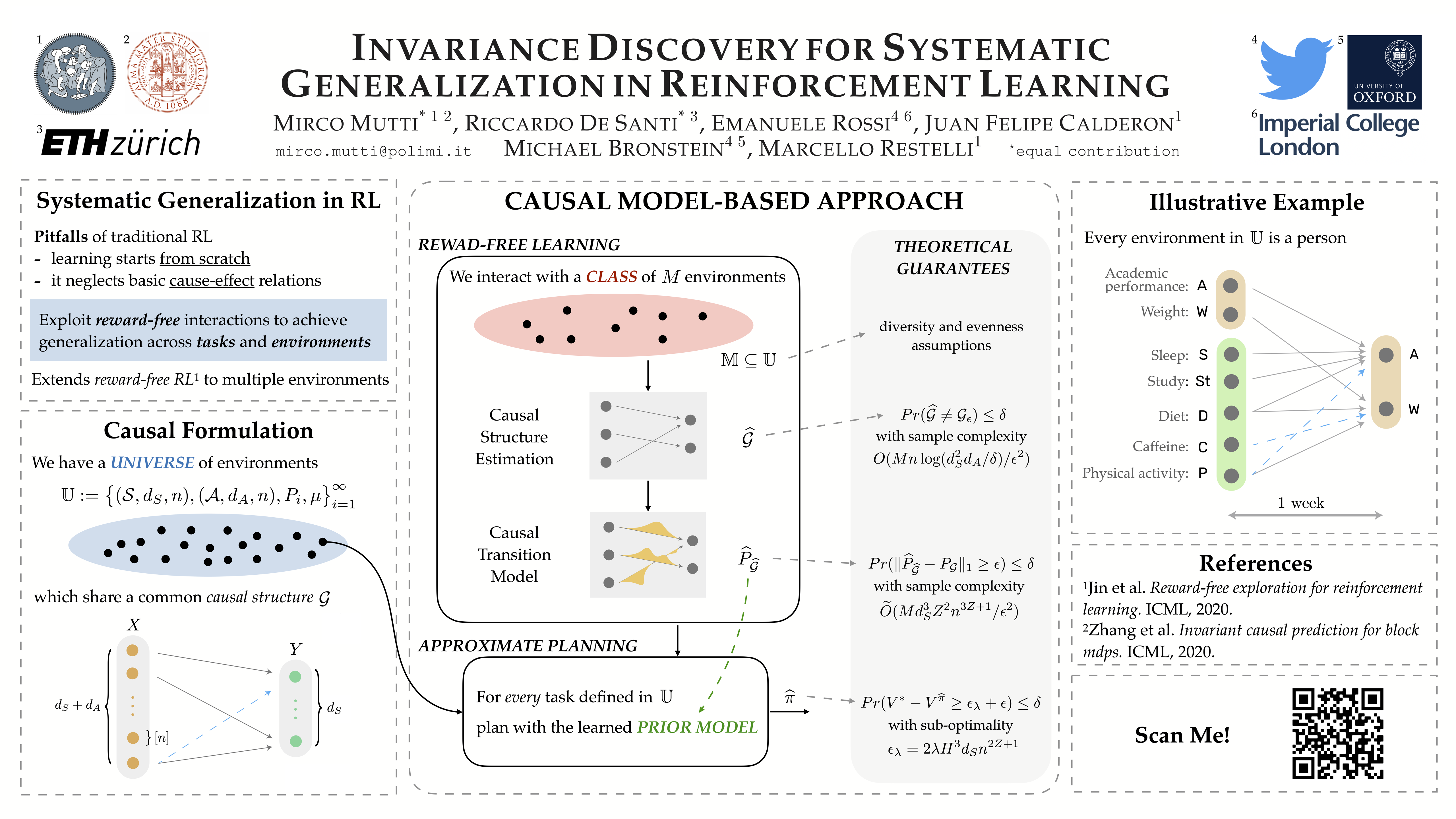
In the sequential decision making setting, an agent aims to achieve systematic generalization over a large, possibly infinite, set of environments. Such environments are modeled as discrete Markov decision processes with both states and actions represented through a feature vector. The underlying structure of the environments allows the transition dynamics to be factored into two components: one that is environment-specific and another one that is shared. Consider a set of environments that share the laws of motion as an illustrative example. In this setting, the agent can take a finite amount of reward-free interactions from a subset of these environments. The agent then must be able to approximately solve any planning task defined over any environment in the original set, relying on the above interactions only. Can we design a provably efficient algorithm that achieves this ambitious goal of systematic generalization? In this paper, we give a partially positive answer to this question. First, we provide the first tractable formulation of systematic generalization by employing a causal viewpoint. Then, under specific structural assumptions, we provide a simple learning algorithm that allows us to guarantee any desired planning error up to an unavoidable sub-optimality term, while showcasing a polynomial sample complexity.