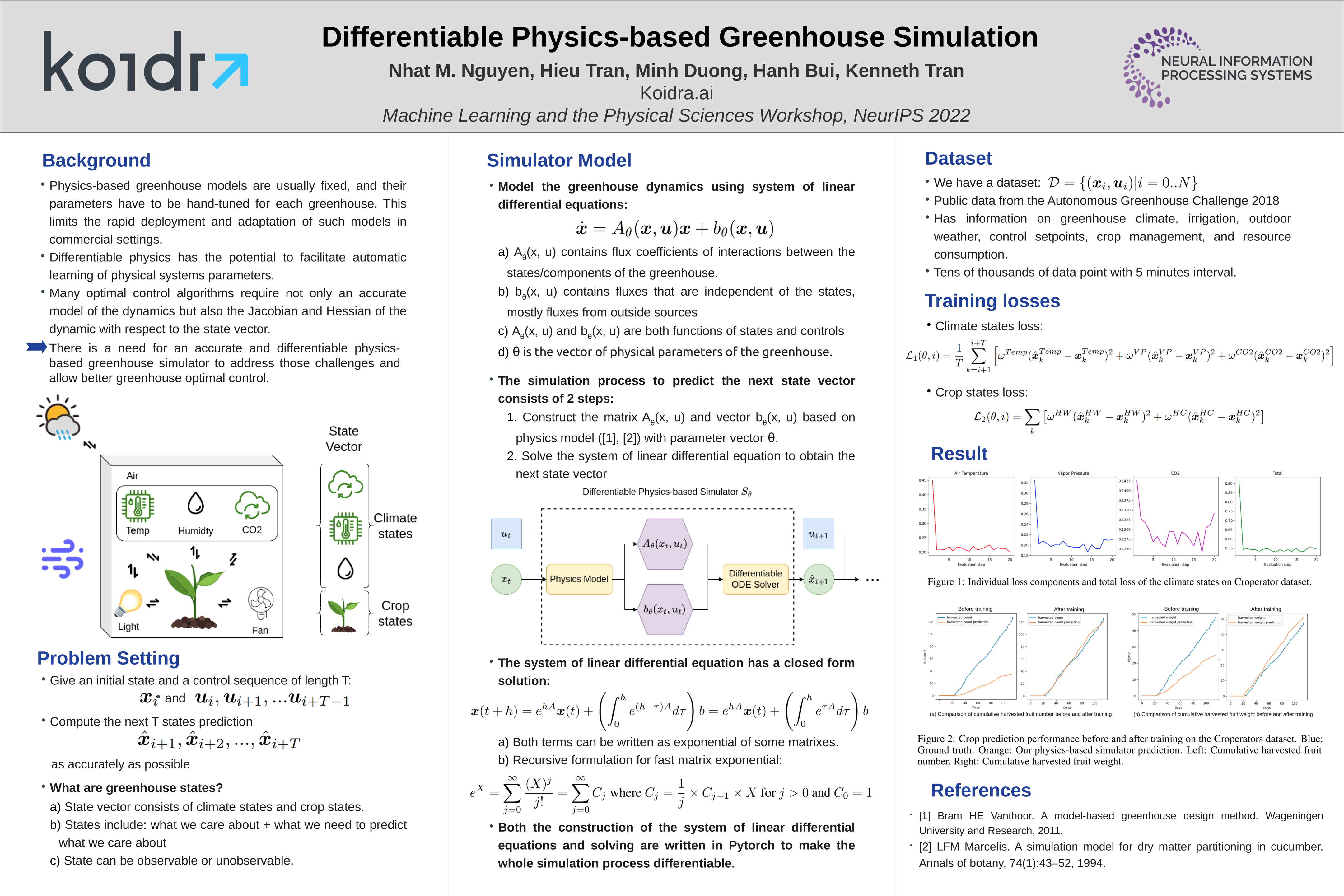
Differentiable Physics-based Greenhouse Simulation
{kind=link}
Abstract
We present a differentiable greenhouse simulation model based on physical processes whose parameters can be obtained by training from real data. The physics-based simulation model is fully interpretable and is able to do state prediction for both climate and crop dynamics in the greenhouse over very a long time horizon. The model works by constructing a system of linear differential equations and solving them to obtain the next state. We propose a procedure to solve the differential equations, handle the problem of missing unobservable states in the data, and train the model efficiently. Our experiment shows the procedure is effective. The model improves significantly after training and can simulate a greenhouse that grows cucumbers accurately.