RoboHive: A Unified Framework for Robot Learning
{kind=link}
Abstract
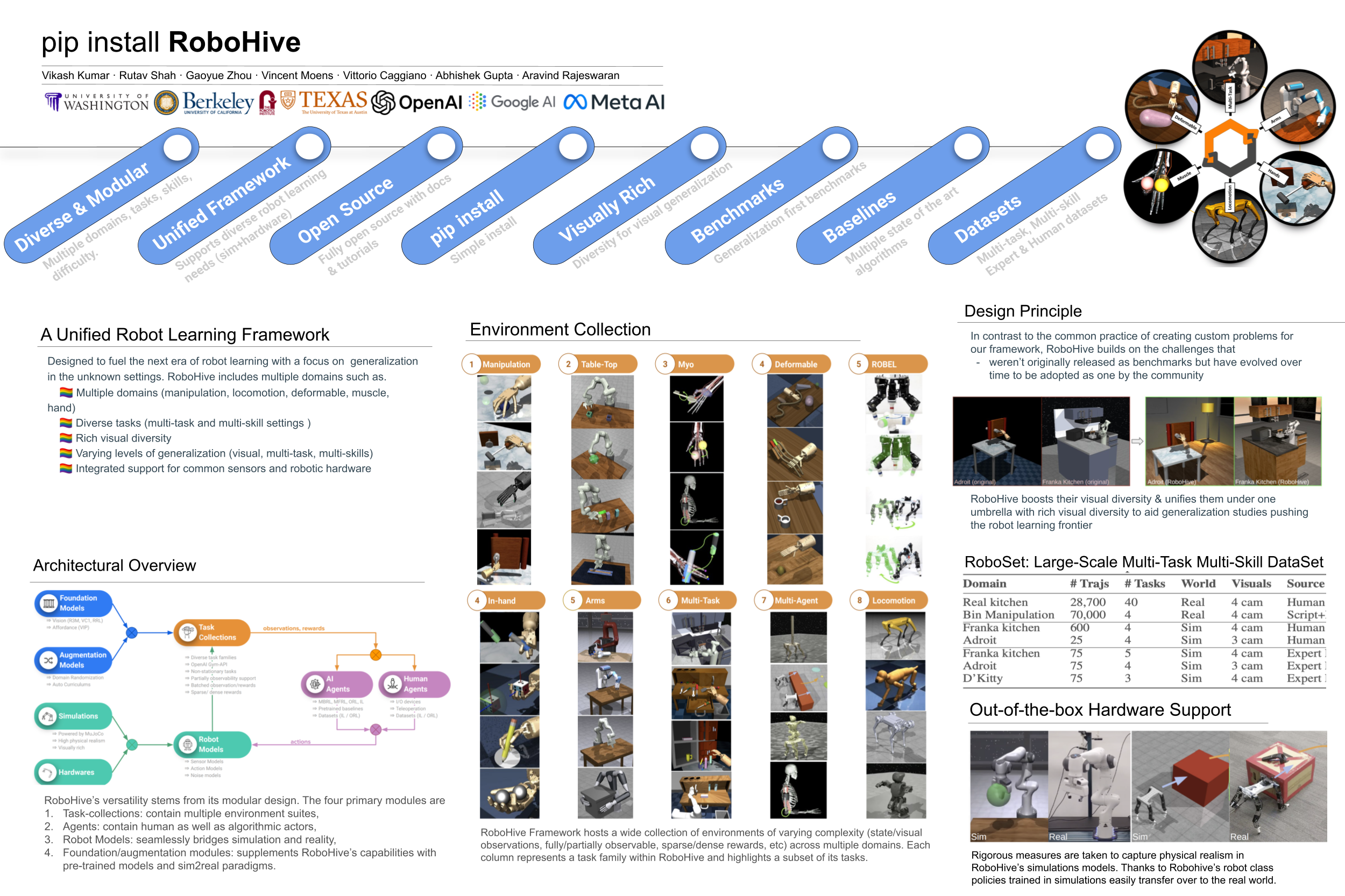
We present RoboHive, a comprehensive software platform and ecosystem for research in the field of Robot Learning and Embodied Artificial Intelligence. Our platform encompasses a diverse range of pre-existing and novel environments, including dexterous manipulation with the Shadow Hand, whole-arm manipulation tasks with Franka and Fetch robots, quadruped locomotion, among others. Included environments are organized within and cover multiple domains such as hand manipulation, locomotion, multi-task, multi-agent, muscles, etc. In comparison to prior works, RoboHive offers a streamlined and unified task interface taking dependency on only a minimal set of well-maintained packages, features tasks with high physics fidelity and rich visual diversity, and supports common hardware drivers for real-world deployment. The unified interface of RoboHive offers a convenient and accessible abstraction for algorithmic research in imitation, reinforcement, multi-task, and hierarchical learning. Furthermore, RoboHive includes expert demonstrations and baseline results for most environments, providing a standard for benchmarking and comparisons. Details: https://sites.google.com/view/robohive