EgoTracks: A Long-term Egocentric Visual Object Tracking Dataset
{kind=link}
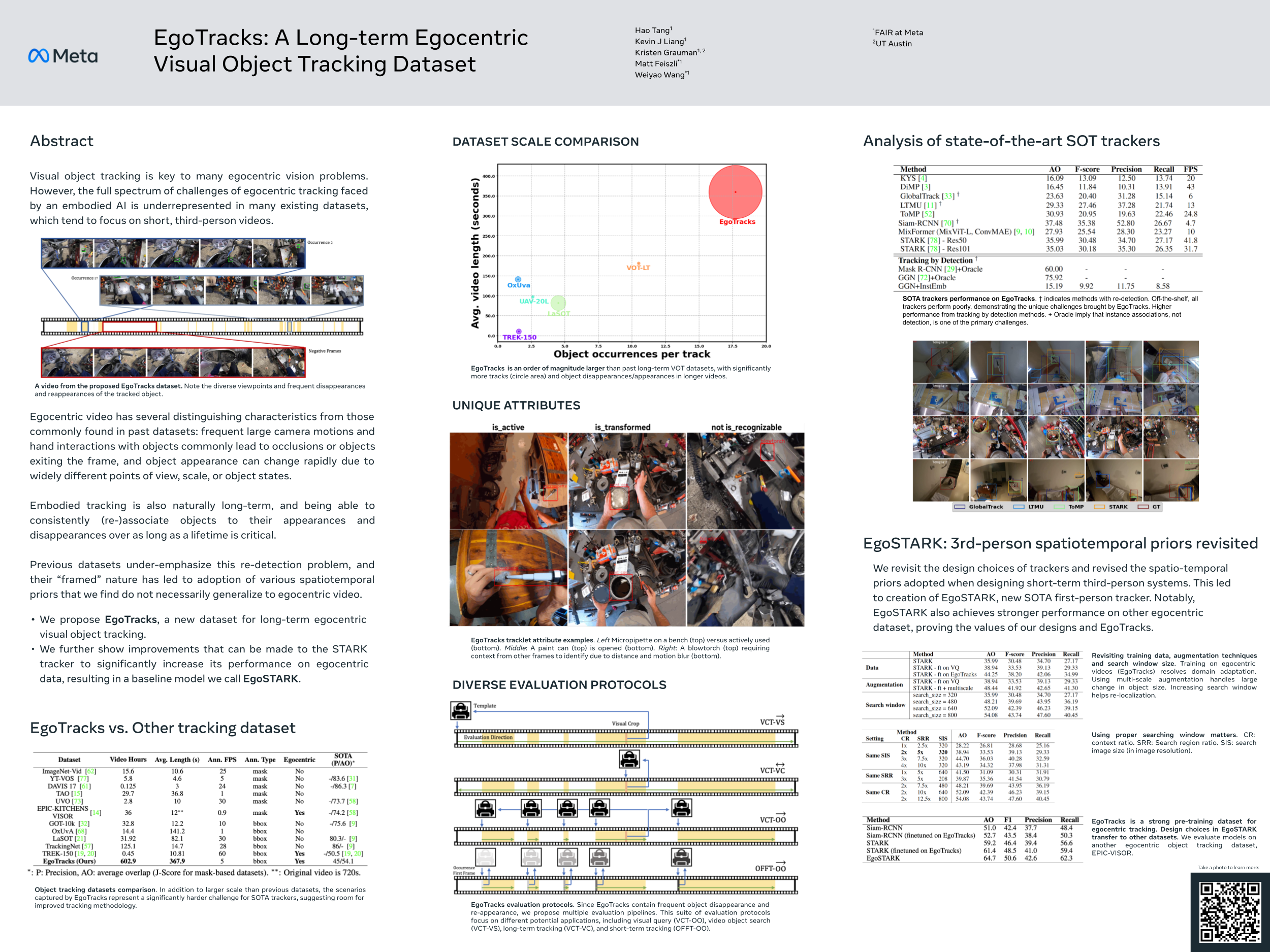
Abstract
Visual object tracking is a key component to many egocentric vision problems. However, the full spectrum of challenges of egocentric tracking faced by an embodied AI is underrepresented in many existing datasets; these tend to focus on relatively short, third-person videos. Egocentric video has several distinguishing characteristics from those commonly found in past datasets: frequent large camera motions and hand interactions with objects commonly lead to occlusions or objects exiting the frame, and object appearance can change rapidly due to widely different points of view, scale, or object states. Embodied tracking is also naturally long-term, and being able to consistently (re-)associate objects to their appearances and disappearances over as long as a lifetime is critical. Previous datasets under-emphasize this re-detection problem, and their "framed" nature has led to adoption of various spatiotemporal priors that we find do not necessarily generalize to egocentric video. We thus introduce EgoTracks, a new dataset for long-term egocentric visual object tracking. Sourced from the Ego4D dataset, this new dataset presents a significant challenge to recent state-of-the-art single-object tracking models, which we find score poorly on traditional tracking metrics for our new dataset, compared to popular benchmarks. We further show improvements that can be made to a STARK tracker to significantly increase its performance on egocentric data, resulting in a baseline model we call EgoSTARK. We publicly release our annotations and benchmark, hoping our dataset leads to further advancements in tracking.