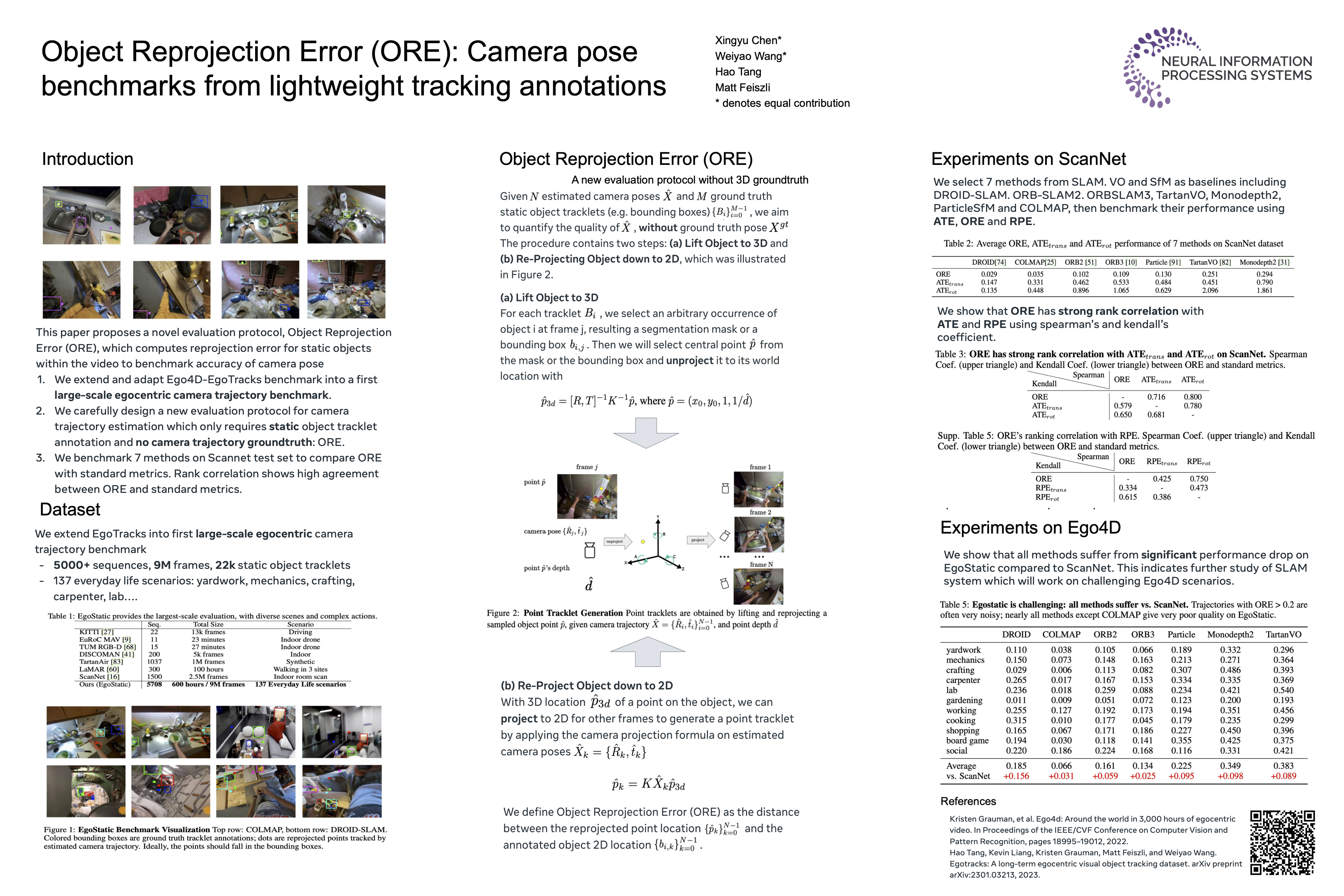
Object Reprojection Error (ORE): Camera pose benchmarks from lightweight tracking annotations
{kind=link}
Abstract
3D spatial understanding is highly valuable in the context of semantic modeling of environments, agents, and their relationships. Semantic modeling approaches employed on monocular video often ingest outputs from off-the-shelf SLAM/SfM pipelines, which are anecdotally observed to perform poorly or fail completely on some fraction of the videos of interest. These target videos may vary widely in complexity of scenes, activities, camera trajectory, etc. Unfortunately, such semantically-rich video data often comes with no ground-truth 3D information, and in practice it is prohibitively costly or impossible to obtain ground truth reconstructions or camera pose post-hoc. This paper proposes a novel evaluation protocol, Object Reprojection Error (ORE) to benchmark camera trajectories; ORE computes reprojection error for static objects within the video and requires only lightweight object tracklet annotations. These annotations are easy to gather on new or existing video, enabling ORE to be calculated on essentially arbitrary datasets. We show that ORE maintains high rank correlation with standard metrics based on groundtruth. Leveraging ORE, we source videos and annotations from Ego4D-EgoTracks, resulting in EgoStatic, a large-scale diverse dataset for evaluating camera trajectories in-the-wild.