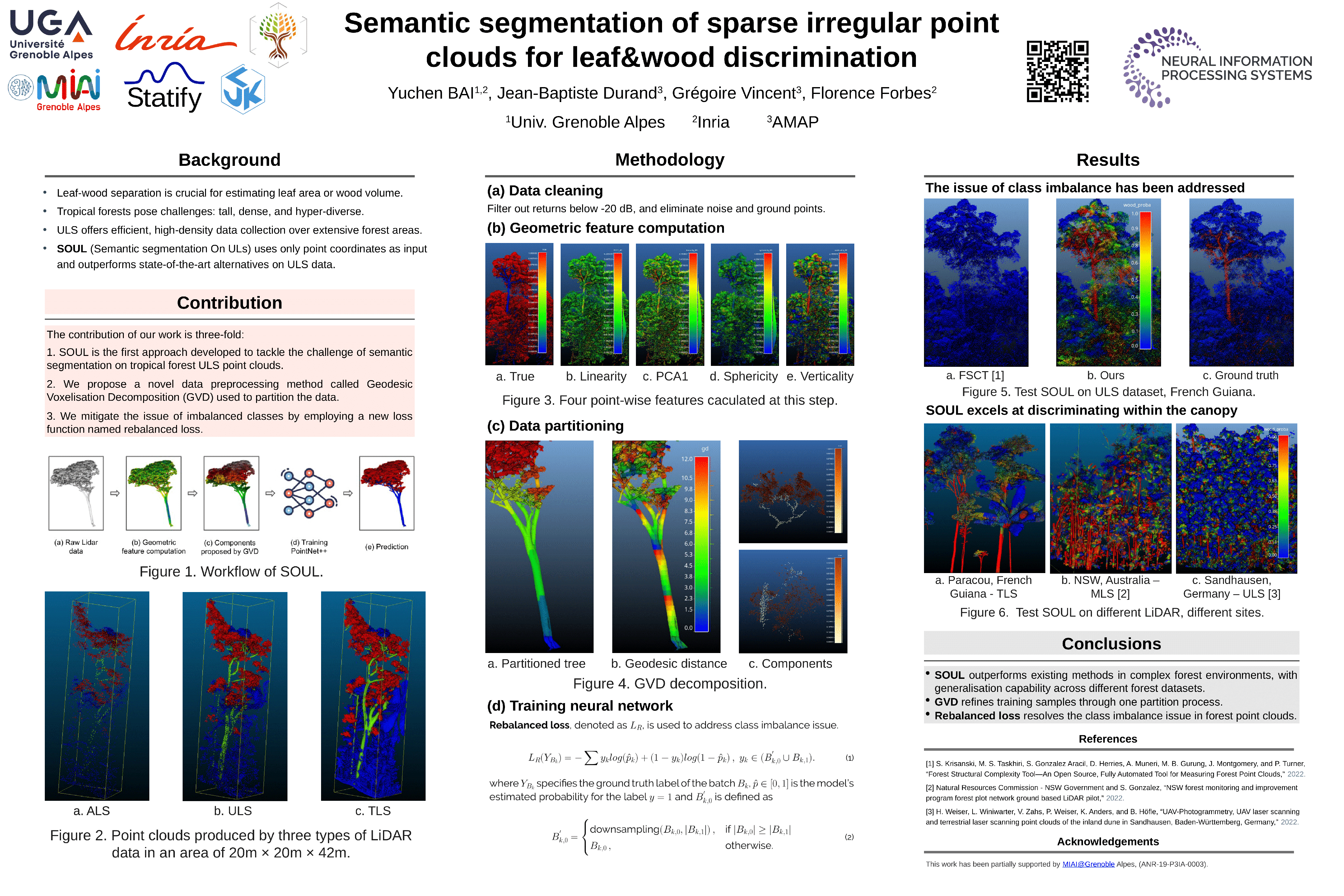
Semantic segmentation of sparse irregular point clouds for leaf/wood discrimination
{kind=link}
Abstract
Lidar (Light Detection and Ranging) has become an essential part of the remote sensing toolbox used for biosphere monitoring. In particular, Lidar provides the opportunity to map forest leaf area with unprecedented accuracy, while leaf area has remained an important source of uncertainty affecting models of gas exchanges between the vegetation and the atmosphere. Unmanned Aerial Vehicles (UAV) are easy to mobilize and therefore allow frequent revisits to track the response of vegetation to climate change. However, miniature sensors embarked on UAVs usually provide point clouds of limited density, which are further affected by a strong decrease in density from top to bottom of the canopy due to progressively stronger occlusion. In such a context, discriminating leaf points from wood points presents a significant challenge due in particular to strong class imbalance and spatially irregular sampling intensity. Here we introduce a neural network model based on the Pointnet ++ architecture which makes use of point geometry only (excluding any spectral information). To cope with local data sparsity, we propose an innovative sampling scheme which strives to preserve local important geometric information. We also propose a loss function adapted to the severe class imbalance. We show that our model outperforms state-of-the-art alternatives on UAV point clouds. We discuss future possible improvements, particularly regarding much denser point clouds acquired from below the canopy.