Diffused Task-Agnostic Milestone Planner
{kind=link}
Abstract
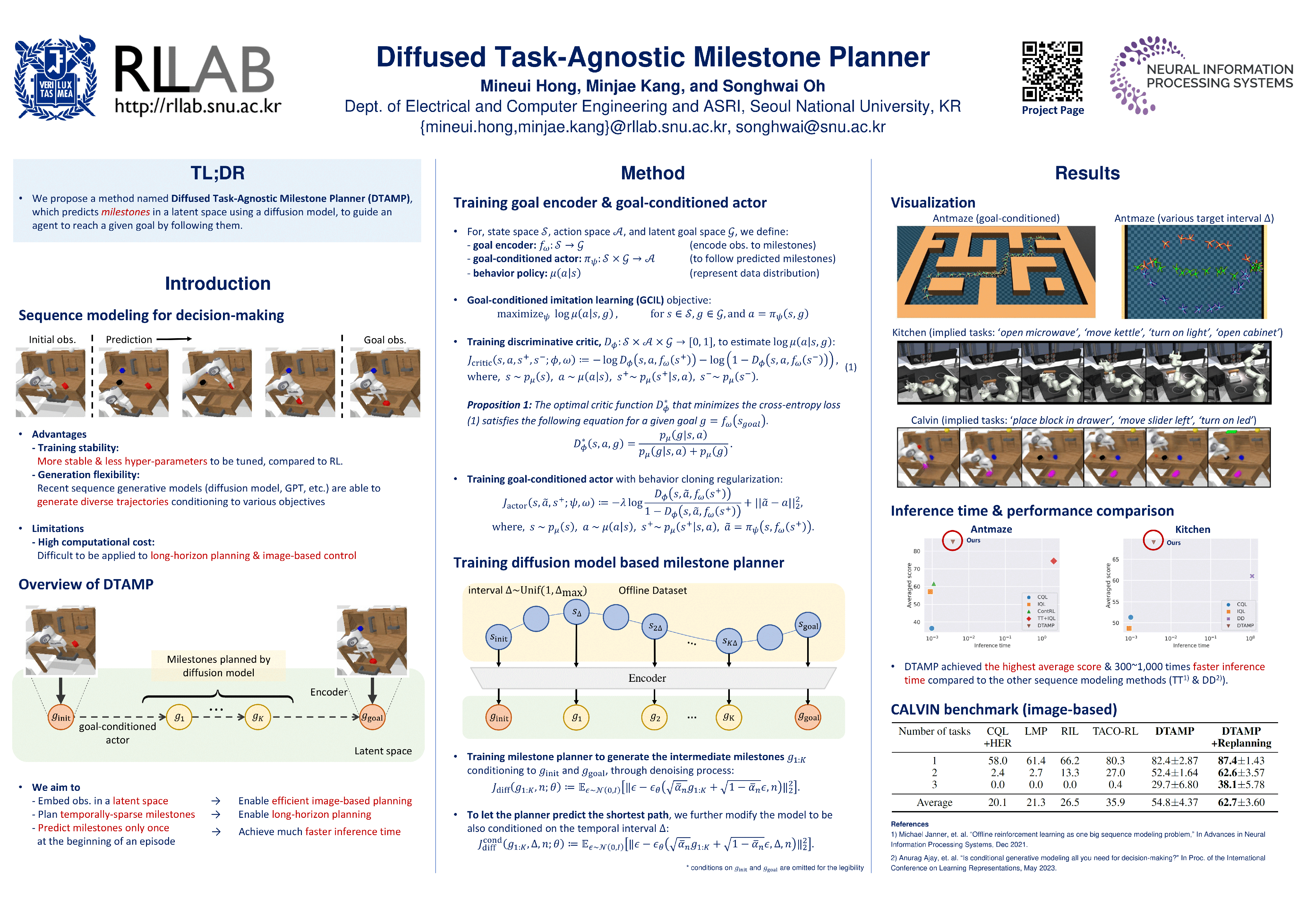
Addressing decision-making problems using sequence modeling to predict future trajectories shows promising results in recent years.In this paper, we take a step further to leverage the sequence predictive method in wider areas such as long-term planning, vision-based control, and multi-task decision-making.To this end, we propose a method to utilize a diffusion-based generative sequence model to plan a series of milestones in a latent space and to have an agent to follow the milestones to accomplish a given task.The proposed method can learn control-relevant, low-dimensional latent representations of milestones, which makes it possible to efficiently perform long-term planning and vision-based control.Furthermore, our approach exploits generation flexibility of the diffusion model, which makes it possible to plan diverse trajectories for multi-task decision-making.We demonstrate the proposed method across offline reinforcement learning (RL) benchmarks and an visual manipulation environment.The results show that our approach outperforms offline RL methods in solving long-horizon, sparse-reward tasks and multi-task problems,while also achieving the state-of-the-art performance on the most challenging vision-based manipulation benchmark.