POMDP Planning for Object Search in Partially Unknown Environment
{kind=link}
Abstract
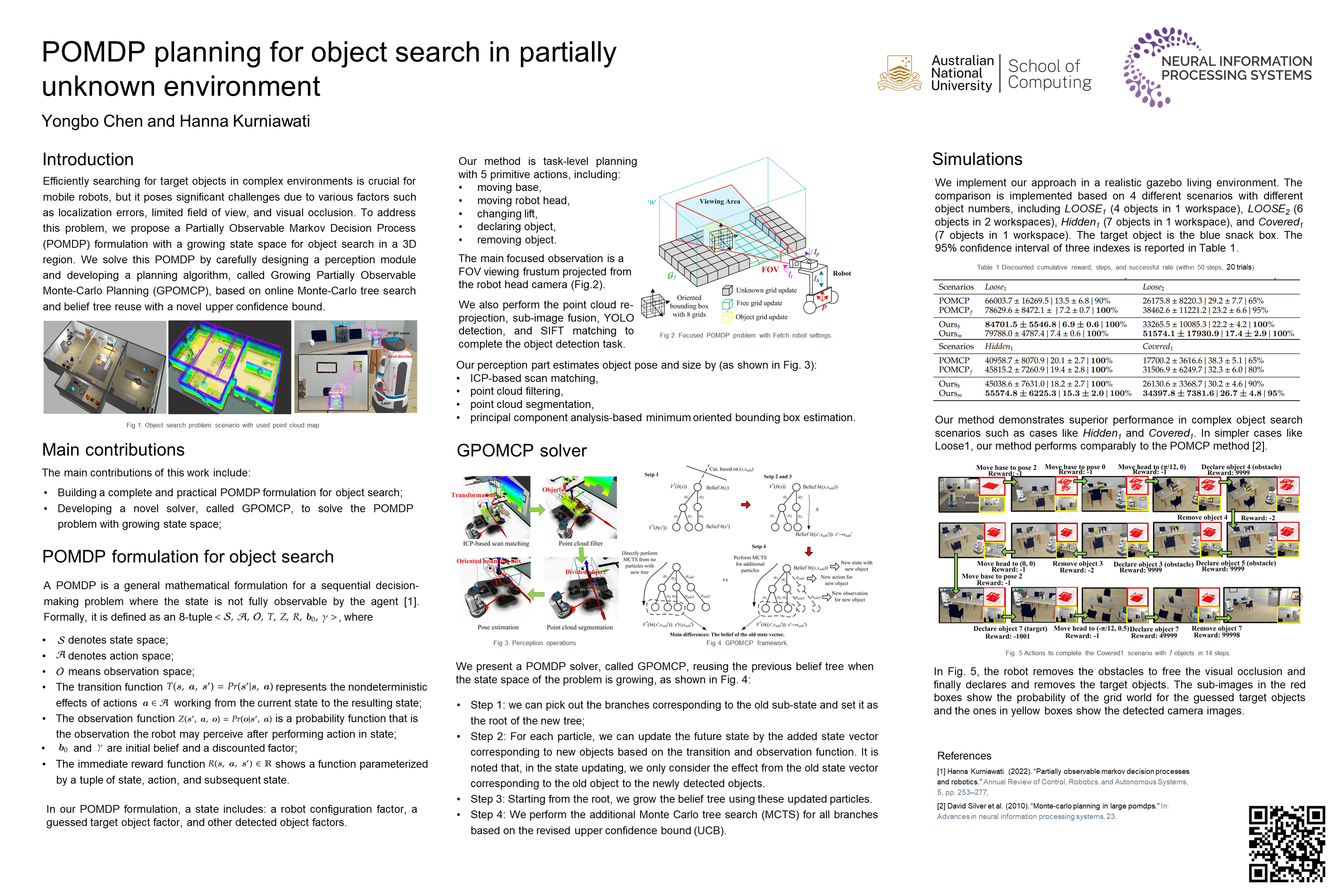
Efficiently searching for target objects in complex environments that contain various types of furniture, such as shelves, tables, and beds, is crucial for mobile robots, but it poses significant challenges due to various factors such as localization errors, limited field of view, and visual occlusion. To address this problem, we propose a Partially Observable Markov Decision Process (POMDP) formulation with a growing state space for object search in a 3D region. We solve this POMDP by carefully designing a perception module and developing a planning algorithm, called Growing Partially Observable Monte-Carlo Planning (GPOMCP), based on online Monte-Carlo tree search and belief tree reuse with a novel upper confidence bound. We have demonstrated that belief tree reuse is reasonable and achieves good performance when the belief differences are limited. Additionally, we introduce a guessed target object with an updating grid world to guide the search in the information-less and reward-less cases, like the absence of any detected objects. We tested our approach using Gazebo simulations on four scenarios of target finding in a realistic indoor living environment with the Fetch robot simulator. Compared to the baseline approaches, which are based on POMCP, our results indicate that our approach enables the robot to find the target object with a higher success rate faster while using the same computational requirements.