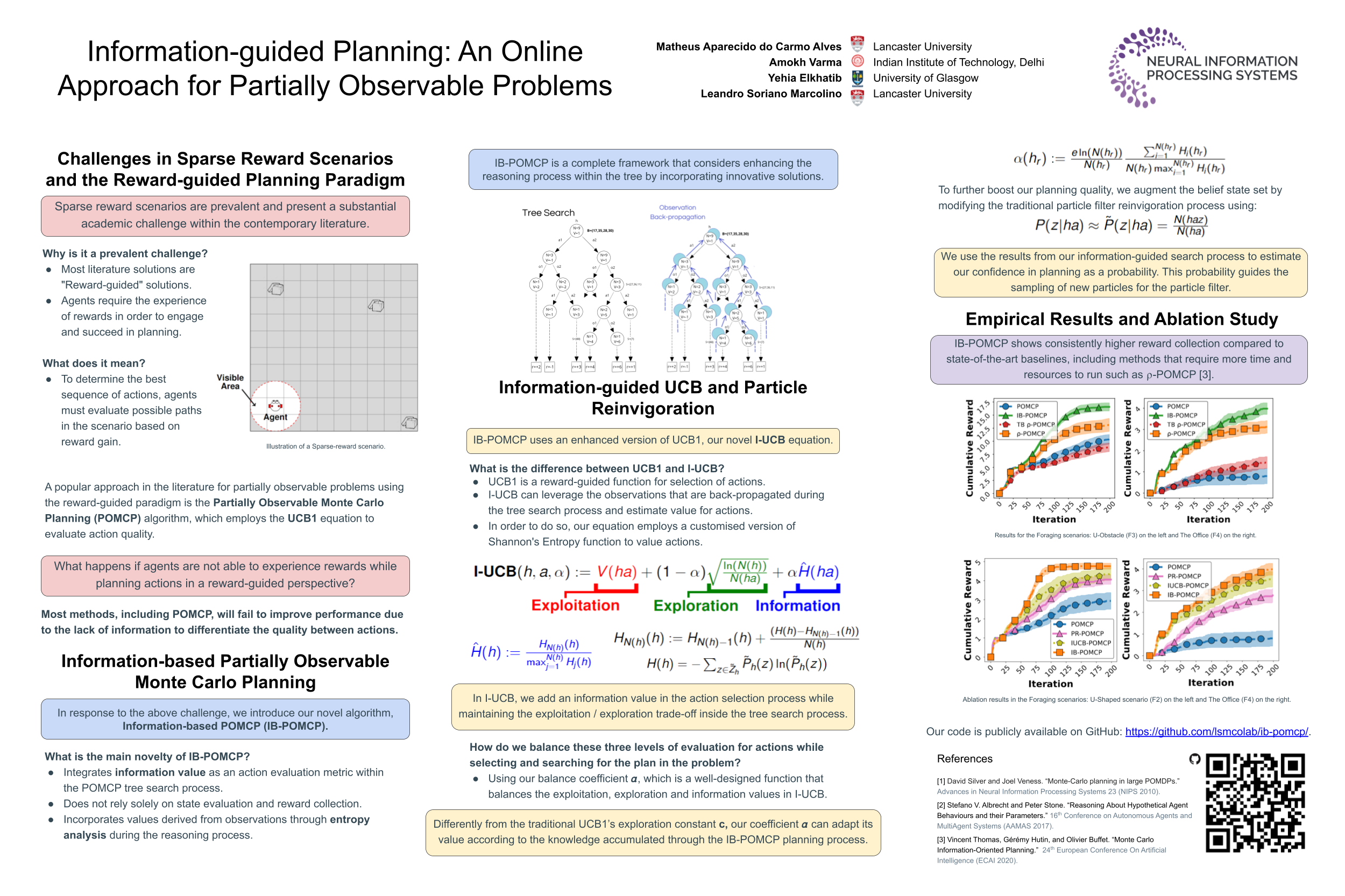
Information-guided Planning: An Online Approach for Partially Observable Problems
Matheus Aparecido Do Carmo Alves ⋅ Amokh Varma ⋅ Yehia Elkhatib ⋅ Leandro Soriano Marcolino
2023 Poster
{kind=link}
Abstract
This paper presents IB-POMCP, a novel algorithm for online planning under partial observability. Our approach enhances the decision-making process by using estimations of the world belief's entropy to guide a tree search process and surpass the limitations of planning in scenarios with sparse reward configurations. By performing what we denominate as an information-guided planning process, the algorithm, which incorporates a novel I-UCB function, shows significant improvements in reward and reasoning time compared to state-of-the-art baselines in several benchmark scenarios, along with theoretical convergence guarantees.
Video
Chat is not available.
Successful Page Load