Estimating Koopman operators with sketching to provably learn large scale dynamical systems
{kind=link}
Abstract
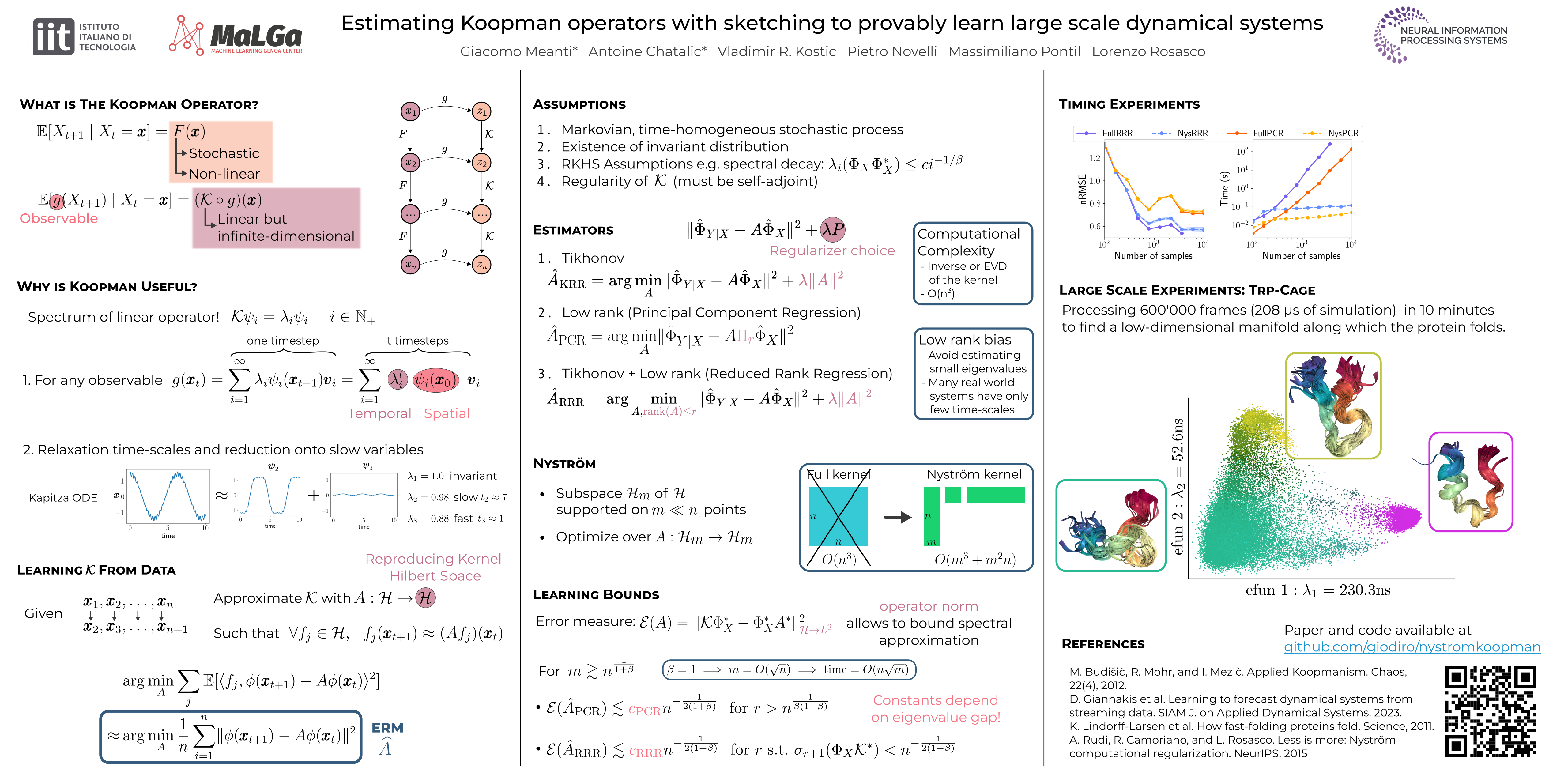
The theory of Koopman operators allows to deploy non-parametric machine learning algorithms to predict and analyze complex dynamical systems.Estimators such as principal component regression (PCR) or reduced rank regression (RRR) in kernel spaces can be shown to provably learn Koopman operators from finite empirical observations of the system's time evolution. Scaling these approaches to very long trajectories is a challenge and requires introducing suitable approximations to make computations feasible. In this paper, we boost the efficiency of different kernel-based Koopman operator estimators using random projections (sketching).We derive, implement and test the new ``sketched'' estimators with extensive experiments on synthetic and large-scale molecular dynamics datasets. Further, we establish non asymptotic error bounds giving a sharp characterization of the trade-offs between statistical learning rates and computational efficiency.Our empirical and theoretical analysis shows that the proposed estimators provide a sound and efficient way to learn large scale dynamical systems.In particular our experiments indicate that the proposed estimators retain the same accuracy of PCR or RRR, while being much faster.