Synthetic-to-Real Pose Estimation with Geometric Reconstruction
{kind=link}
Abstract
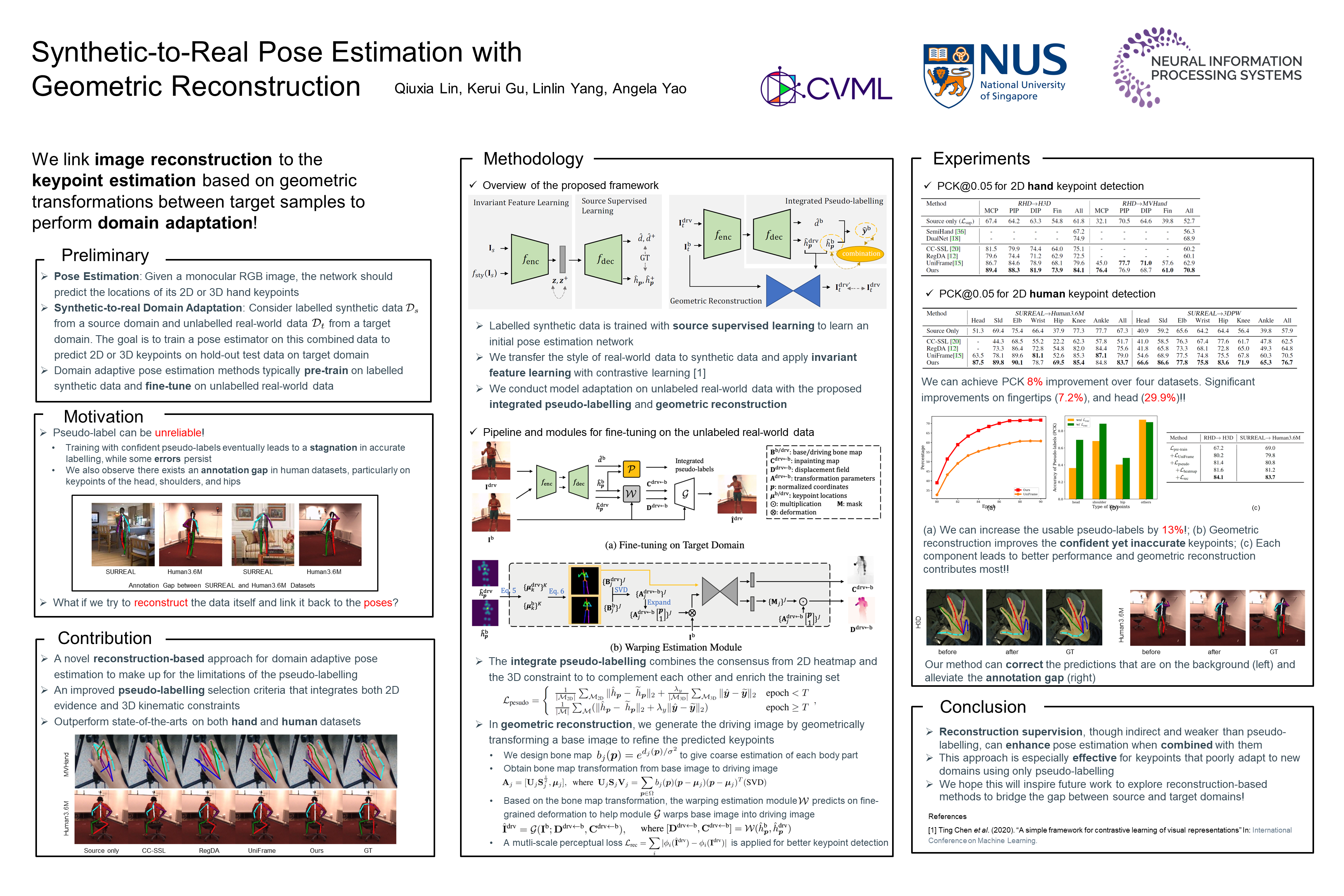
Pose estimation is remarkably successful under supervised learning, but obtaining annotations, especially for new deployments, is costly and time-consuming. This work tackles adapting models trained on synthetic data to real-world target domains with only unlabelled data. A common approach is model fine-tuning with pseudo-labels from the target domain; yet many pseudo-labelling strategies cannot provide sufficient high-quality pose labels. This work proposes a reconstruction-based strategy as a complement to pseudo-labelling for synthetic-to-real domain adaptation. We generate the driving image by geometrically transforming a base image according to the predicted keypoints and enforce a reconstruction loss to refine the predictions. It provides a novel solution to effectively correct confident yet inaccurate keypoint locations through image reconstruction in domain adaptation. Our approach outperforms the previous state-of-the-arts by 8% for PCK on four large-scale hand and human real-world datasets. In particular, we excel on endpoints such as fingertips and head, with 7.2% and 29.9% improvements in PCK.