Hybrid Policy Optimization from Imperfect Demonstrations
{kind=link}
Abstract
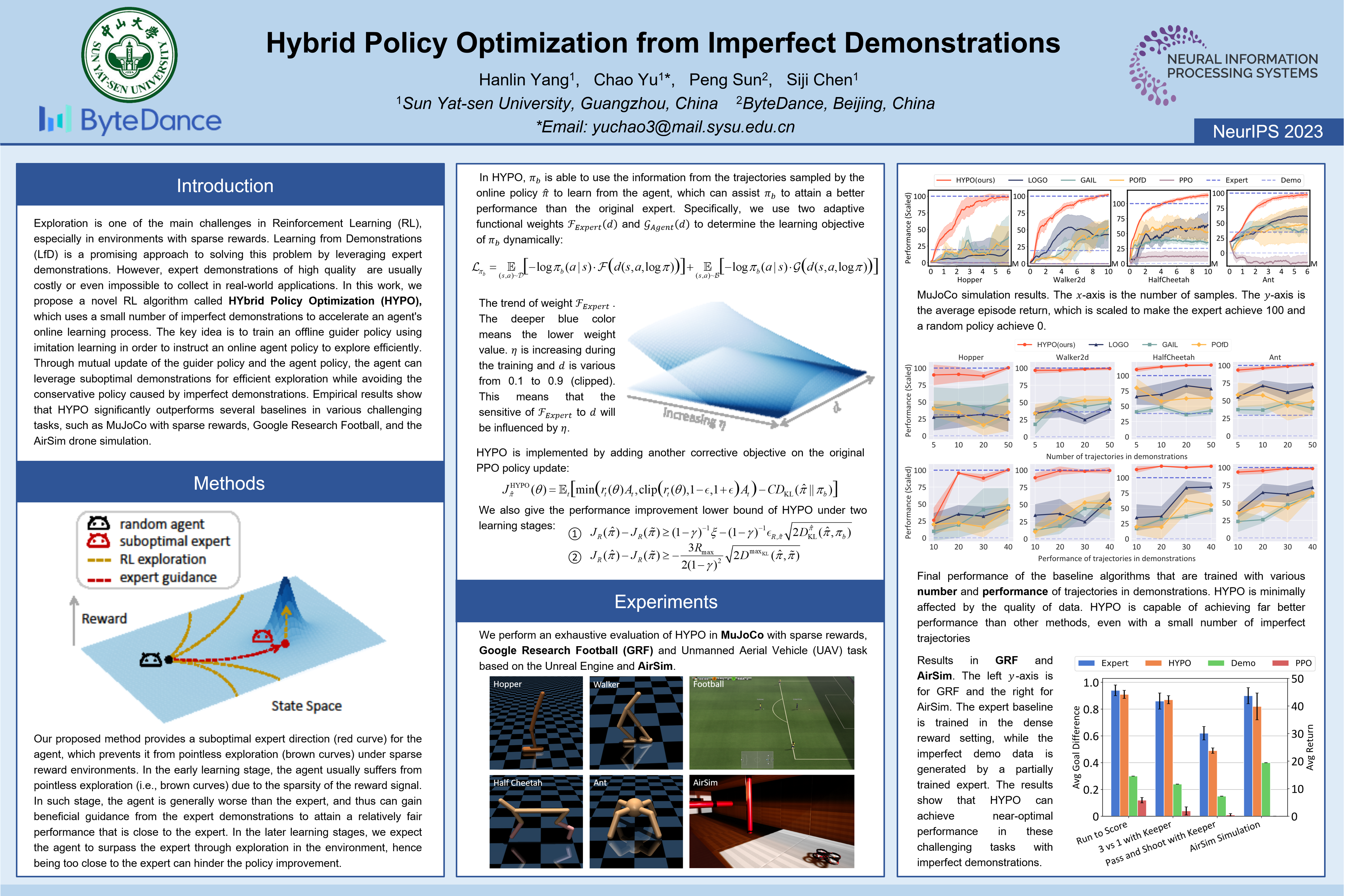
Exploration is one of the main challenges in Reinforcement Learning (RL), especially in environments with sparse rewards. Learning from Demonstrations (LfD) is a promising approach to solving this problem by leveraging expert demonstrations. However, expert demonstrations of high quality are usually costly or even impossible to collect in real-world applications. In this work, we propose a novel RL algorithm called HYbrid Policy Optimization (HYPO), which uses a small number of imperfect demonstrations to accelerate an agent's online learning process. The key idea is to train an offline guider policy using imitation learning in order to instruct an online agent policy to explore efficiently. Through mutual update of the guider policy and the agent policy, the agent can leverage suboptimal demonstrations for efficient exploration while avoiding the conservative policy caused by imperfect demonstrations. Empirical results show that HYPO significantly outperforms several baselines in various challenging tasks, such as MuJoCo with sparse rewards, Google Research Football, and the AirSim drone simulation.