Efficient Policy Adaptation with Contrastive Prompt Ensemble for Embodied Agents
{kind=link}
Abstract
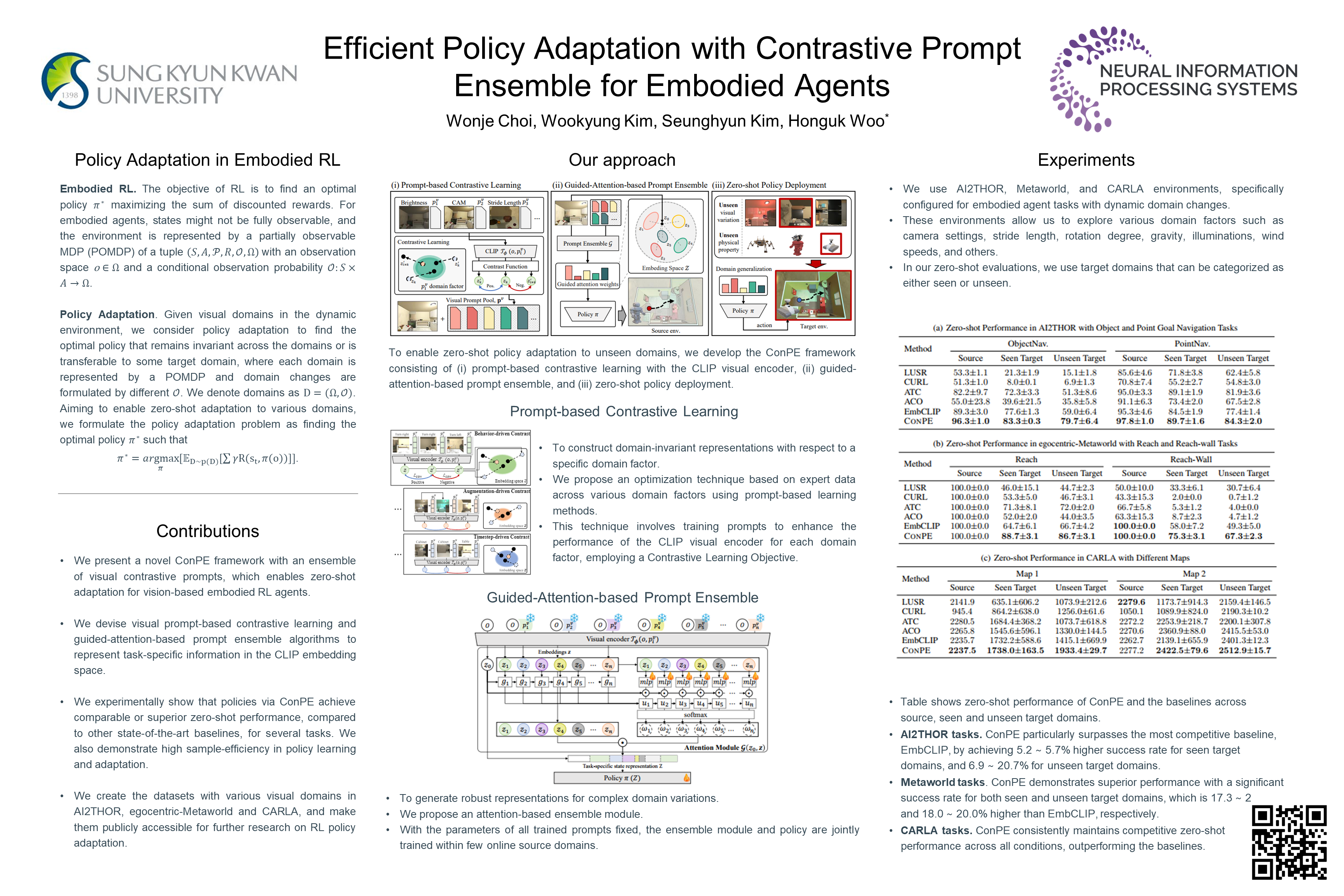
For embodied reinforcement learning (RL) agents interacting with the environment, it is desirable to have rapid policy adaptation to unseen visual observations, but achieving zero-shot adaptation capability is considered as a challenging problem in the RL context. To address the problem, we present a novel contrastive prompt ensemble (ConPE) framework which utilizes a pretrained vision-language model and a set of visual prompts, thus enables efficient policy learning and adaptation upon a wide range of environmental and physical changes encountered by embodied agents. Specifically, we devise a guided-attention-based ensemble approach with multiple visual prompts on the vision-language model to construct robust state representations. Each prompt is contrastively learned in terms of an individual domain factors that significantly affects the agent's egocentric perception and observation. For a given task, the attention-based ensemble and policy are jointly learned so that the resulting state representations not only generalize to various domains but are also optimized for learning the task. Through experiments, we show that ConPE outperforms other state-of-the-art algorithms for several embodied agent tasks including navigation in AI2THOR, manipulation in Metaworld, and autonomous driving in CARLA, while also improving the sample efficiency of policy learning and adaptation.