Goal-conditioned Offline Planning from Curious Exploration
{kind=link}
Abstract
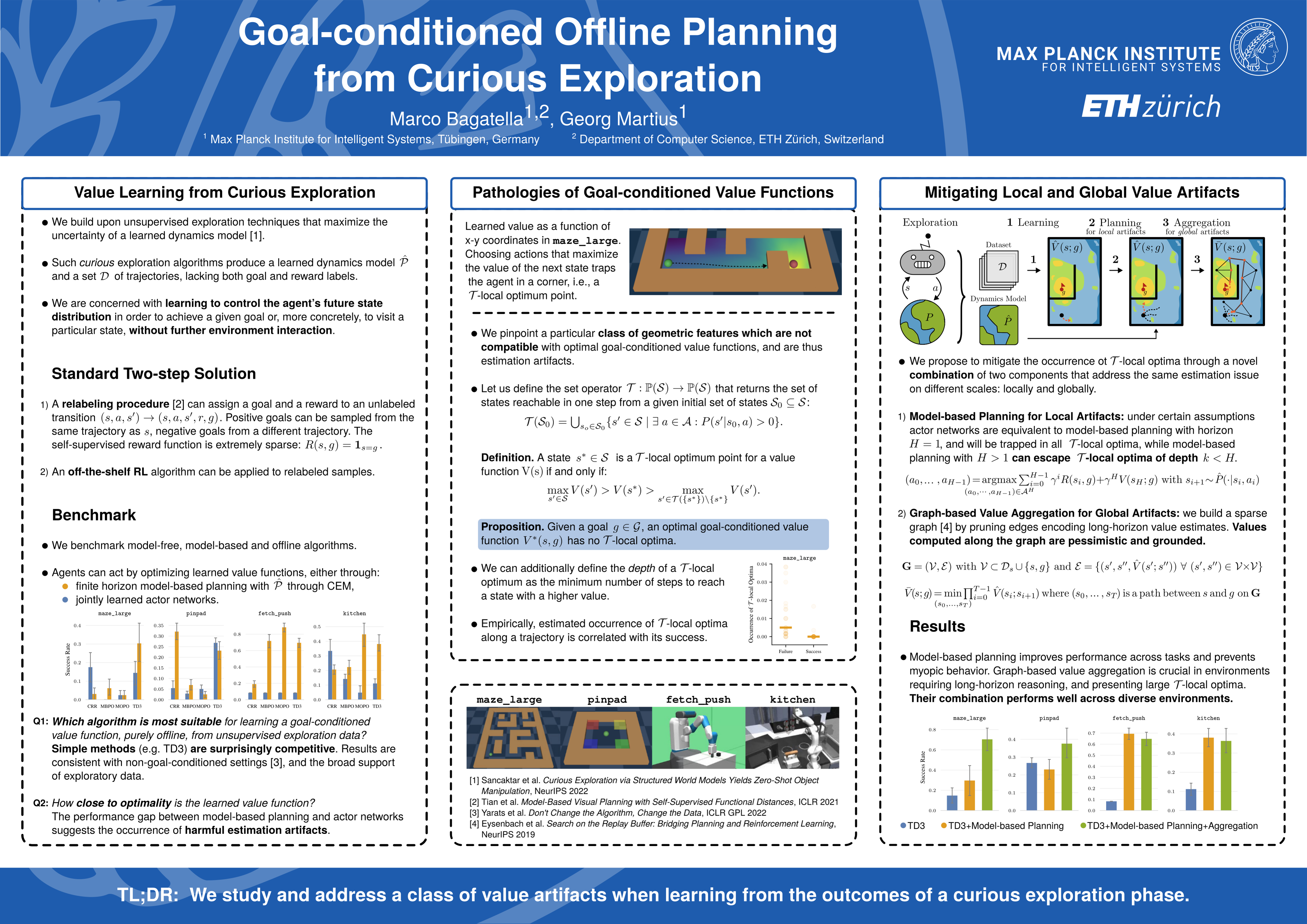
Curiosity has established itself as a powerful exploration strategy in deep reinforcement learning. Notably, leveraging expected future novelty as intrinsic motivation has been shown to efficiently generate exploratory trajectories, as well as a robust dynamics model. We consider the challenge of extracting goal-conditioned behavior from the products of such unsupervised exploration techniques, without any additional environment interaction. We find that conventional goal-conditioned reinforcement learning approaches for extracting a value function and policy fall short in this difficult offline setting. By analyzing the geometry of optimal goal-conditioned value functions, we relate this issue to a specific class of estimation artifacts in learned values. In order to mitigate their occurrence, we propose to combine model-based planning over learned value landscapes with a graph-based value aggregation scheme. We show how this combination can correct both local and global artifacts, obtaining significant improvements in zero-shot goal-reaching performance across diverse simulated environments.