Posterior Sampling for Competitive RL: Function Approximation and Partial Observation
Shuang Qiu ⋅ Ziyu Dai ⋅ Han Zhong ⋅ Zhaoran Wang ⋅ Zhuoran Yang ⋅ Tong Zhang
2023 Poster
{kind=link}
Abstract
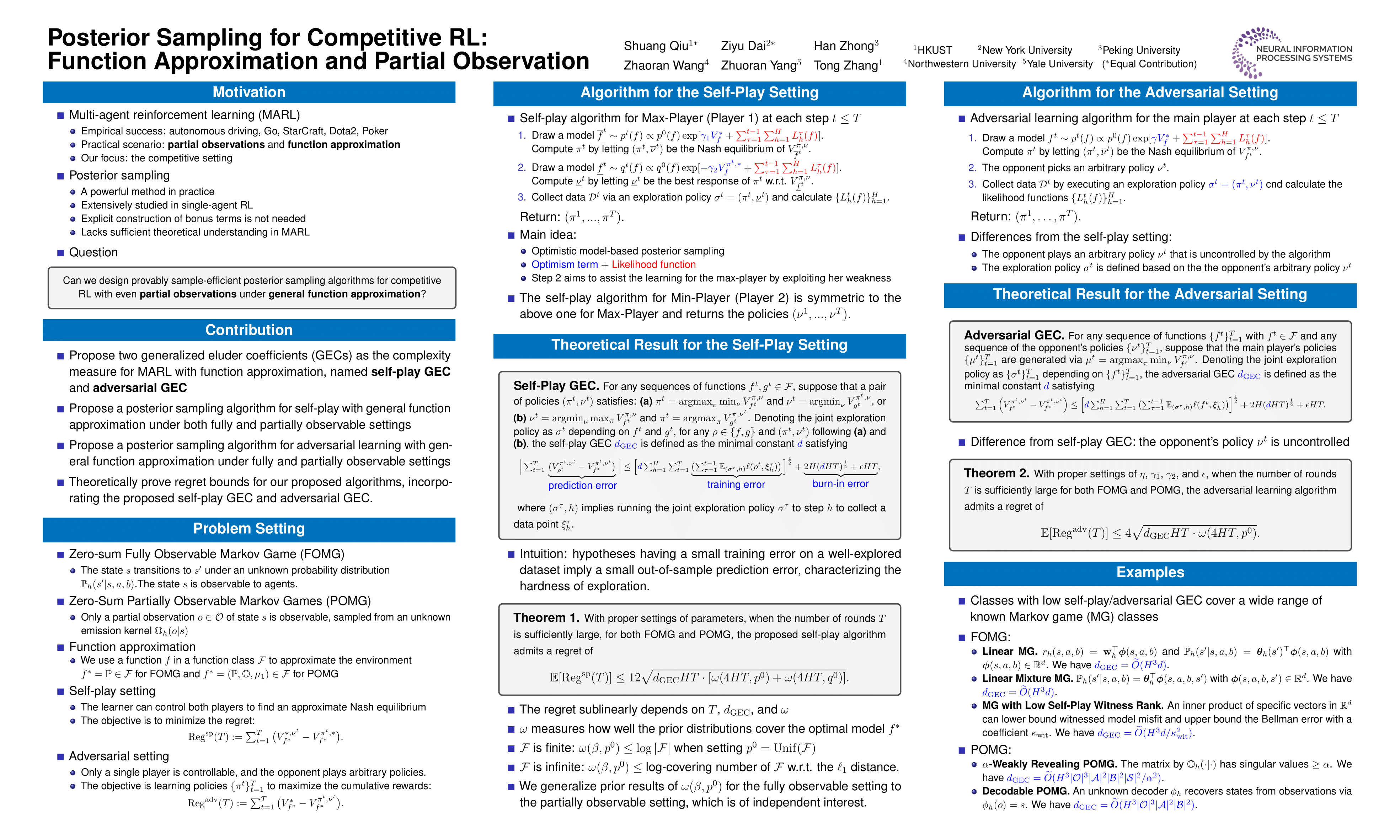
This paper investigates posterior sampling algorithms for competitive reinforcement learning (RL) in the context of general function approximations. Focusing on zero-sum Markov games (MGs) under two critical settings, namely self-play and adversarial learning, we first propose the self-play and adversarial generalized eluder coefficient (GEC) as complexity measures for function approximation, capturing the exploration-exploitation trade-off in MGs. Based on self-play GEC, we propose a model-based self-play posterior sampling method to control both players to learn Nash equilibrium, which can successfully handle the partial observability of states. Furthermore, we identify a set of partially observable MG models fitting MG learning with the adversarial policies of the opponent. Incorporating the adversarial GEC, we propose a model-based posterior sampling method for learning adversarial MG with potential partial observability. We further provide low regret bounds for proposed algorithms that can scale sublinearly with the proposed GEC and the number of episodes $T$. To the best of our knowledge, we for the first time develop generic model-based posterior sampling algorithms for competitive RL that can be applied to a majority of tractable zero-sum MG classes in both fully observable and partially observable MGs with self-play and adversarial learning.
Video
Chat is not available.
Successful Page Load