Detection Based Part-level Articulated Object Reconstruction from Single RGBD Image
{kind=link}
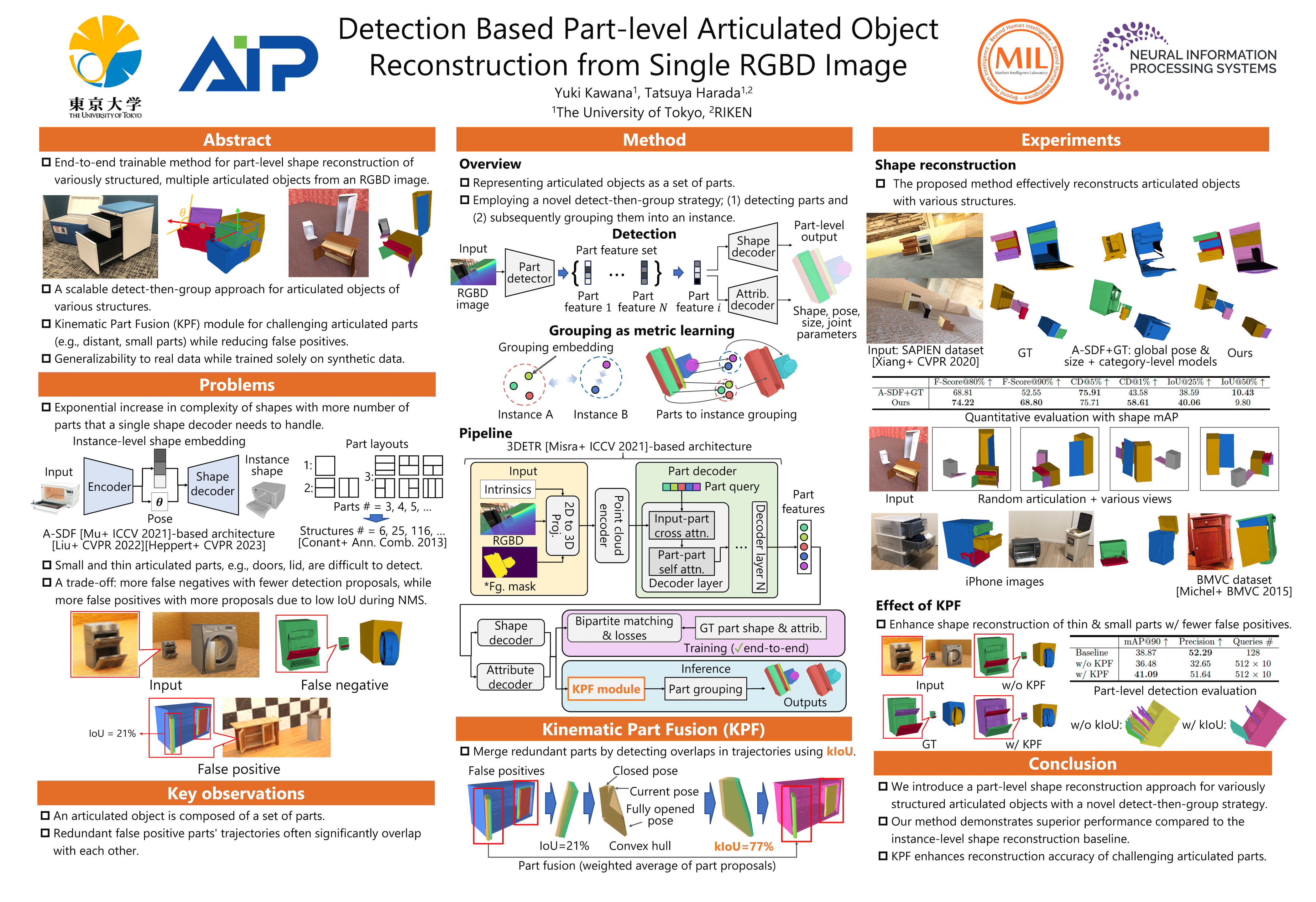
Abstract
We propose an end-to-end trainable, cross-category method for reconstructing multiple man-made articulated objects from a single RGBD image, focusing on part-level shape reconstruction and pose and kinematics estimation. We depart from previous works that rely on learning instance-level latent space, focusing on man-made articulated objects with predefined part counts. Instead, we propose a novel alternative approach that employs part-level representation, representing instances as combinations of detected parts. While our detect-then-group approach effectively handles instances with diverse part structures and various part counts, it faces issues of false positives, varying part sizes and scales, and an increasing model size due to end-to-end training. To address these challenges, we propose 1) test-time kinematics-aware part fusion to improve detection performance while suppressing false positives, 2) anisotropic scale normalization for part shape learning to accommodate various part sizes and scales, and 3) a balancing strategy for cross-refinement between feature space and output space to improve part detection while maintaining model size. Evaluation on both synthetic and real data demonstrates that our method successfully reconstructs variously structured multiple instances that previous works cannot handle, and outperforms prior works in shape reconstruction and kinematics estimation.