GraphMP: Graph Neural Network-based Motion Planning with Efficient Graph Search
{kind=link}
Abstract
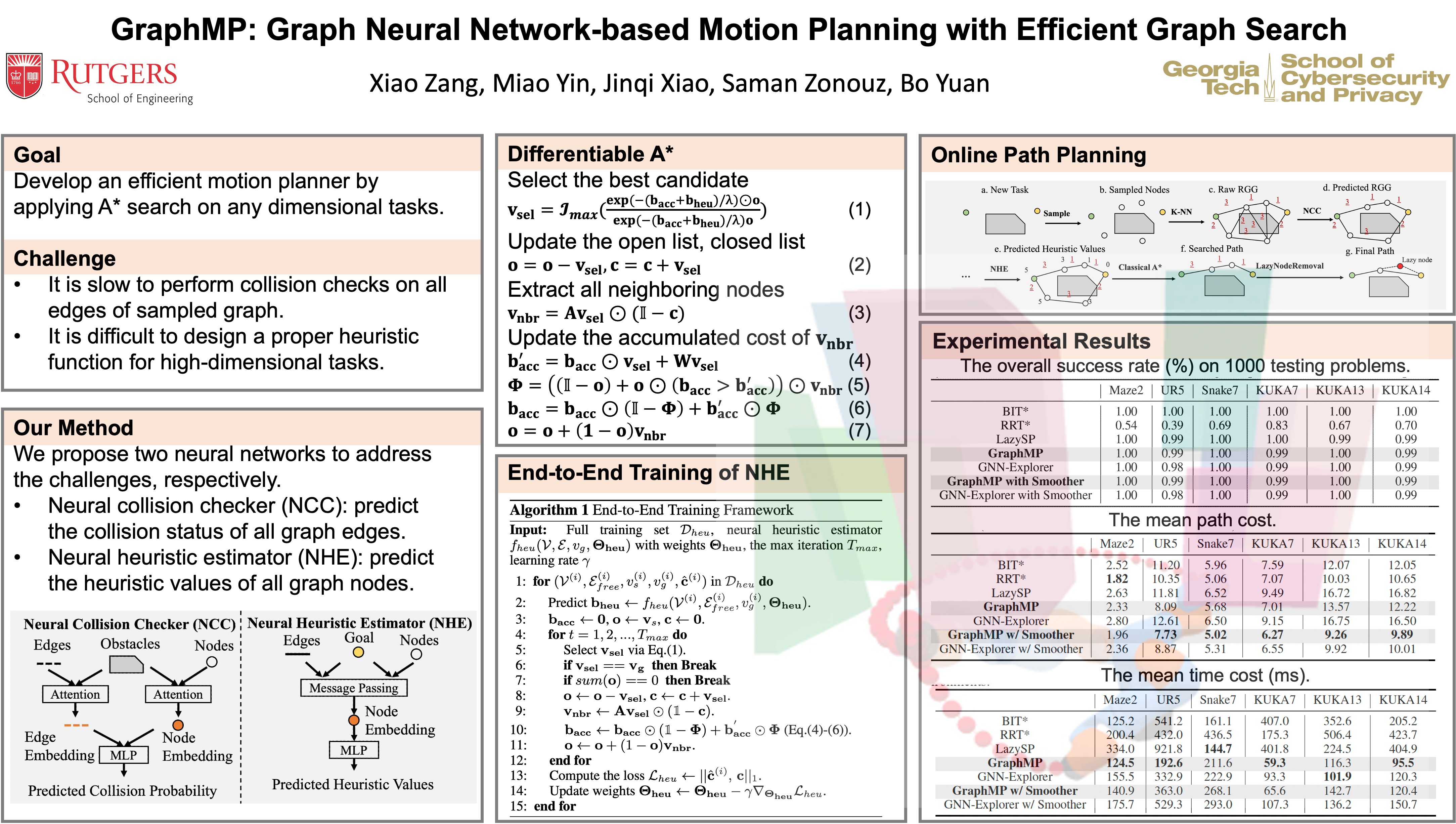
Motion planning, which aims to find a high-quality collision-free path in the configuration space, is a fundamental task in robotic systems. Recently, learning-based motion planners, especially the graph neural network-powered, have shown promising planning performance. However, though the state-of-the-art GNN planner can efficiently extract and learn graph information, its inherent mechanism is not well suited for graph search process, hindering its further performance improvement. To address this challenge and fully unleash the potential of GNN in motion planning, this paper proposes GraphMP, a neural motion planner for both low and high-dimensional planning tasks. With the customized model architecture and training mechanism design, GraphMP can simultaneously perform efficient graph pattern extraction and graph search processing, leading to strong planning performance. Experiments on a variety of environments, ranging from 2D Maze to 14D dual KUKA robotic arm, show that our proposed GraphMP achieves significant improvement on path quality and planning speed over the state-of-the-art learning-based and classical planners; while preserving the competitive success rate.