CP-SLAM: Collaborative Neural Point-based SLAM System
{kind=link}
Abstract
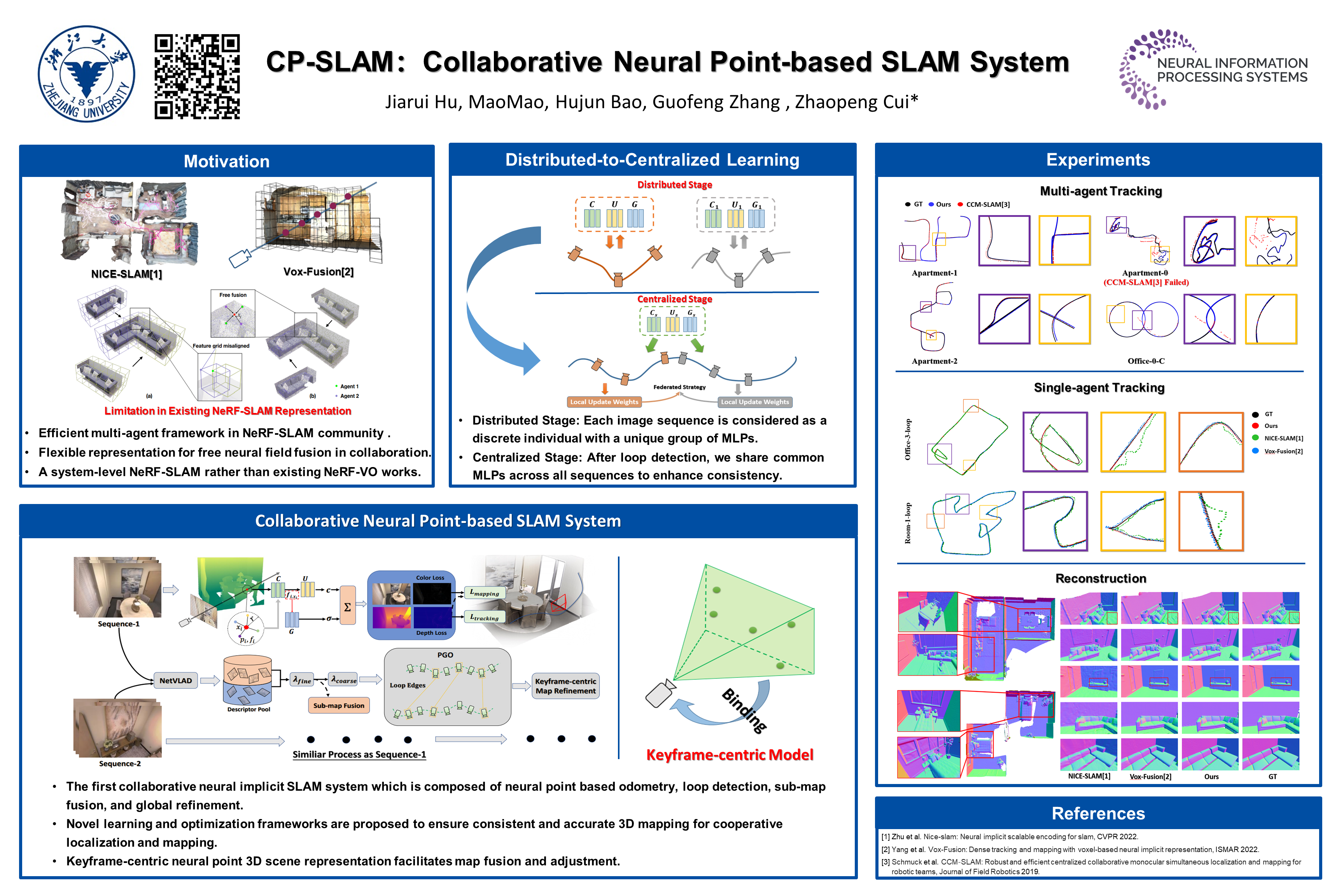
This paper presents a collaborative implicit neural simultaneous localization and mapping (SLAM) system with RGB-D image sequences, which consists of complete front-end and back-end modules including odometry, loop detection, sub-map fusion, and global refinement. In order to enable all these modules in a unified framework, we propose a novel neural point based 3D scene representation in which each point maintains a learnable neural feature for scene encoding and is associated with a certain keyframe. Moreover, a distributed-to-centralized learning strategy is proposed for the collaborative implicit SLAM to improve consistency and cooperation. A novel global optimization framework is also proposed to improve the system accuracy like traditional bundle adjustment. Experiments on various datasets demonstrate the superiority of the proposed method in both camera tracking and mapping.