The Rank-Reduced Kalman Filter: Approximate Dynamical-Low-Rank Filtering In High Dimensions
{kind=link}
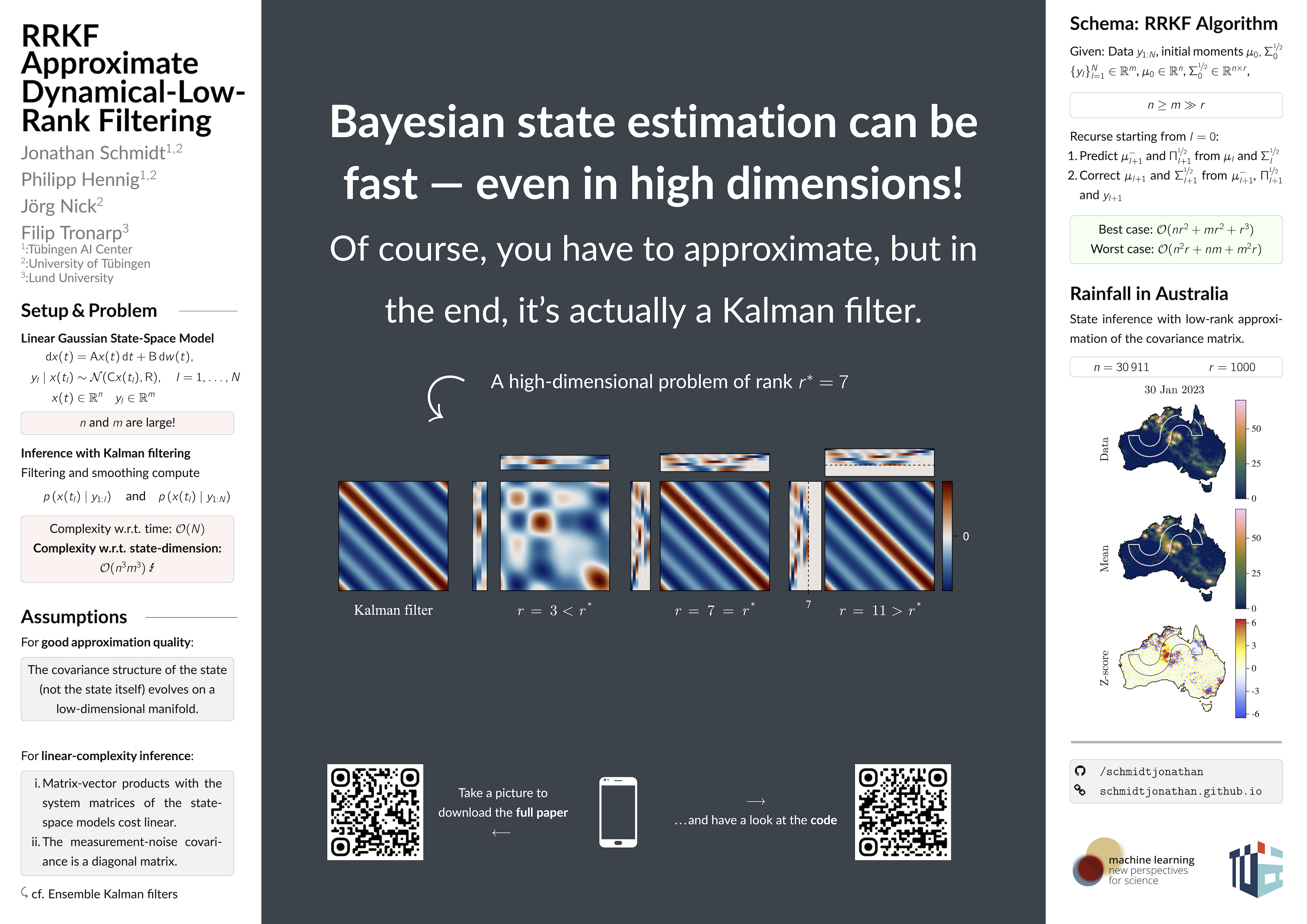
Abstract
Inference and simulation in the context of high-dimensional dynamical systems remain computationally challenging problems.Some form of dimensionality reduction is required to make the problem tractable in general.In this paper, we propose a novel approximate Gaussian filtering and smoothing methodwhich propagates low-rank approximations of the covariance matrices.This is accomplished by projecting the Lyapunov equations associated with the prediction step to a manifold of low-rank matrices,which are then solved by a recently developed, numerically stable, dynamical low-rank integrator.Meanwhile, the update steps are made tractable by noting that the covariance update only transforms the column space of the covariance matrix, which is low-rank by construction.The algorithm differentiates itself from existing ensemble-based approaches in thatthe low-rank approximations of the covariance matrices are deterministic, rather than stochastic.Crucially, this enables the method to reproduce the exact Kalman filter as the low-rank dimension approaches the true dimensionality of the problem.Our method reduces computational complexity from cubic (for the Kalman filter) to quadratic in the state-space size in the worst-case, and can achieve linear complexity if the state-space model satisfies certain criteria.Through a set of experiments in classical data-assimilation and spatio-temporal regression, we show that the proposed method consistently outperforms the ensemble-based methods in terms of error in the mean and covariance with respect to the exact Kalman filter. This comes at no additional cost in terms of asymptotic computational complexity.