What Planning Problems Can A Relational Neural Network Solve?
{kind=link}
Abstract
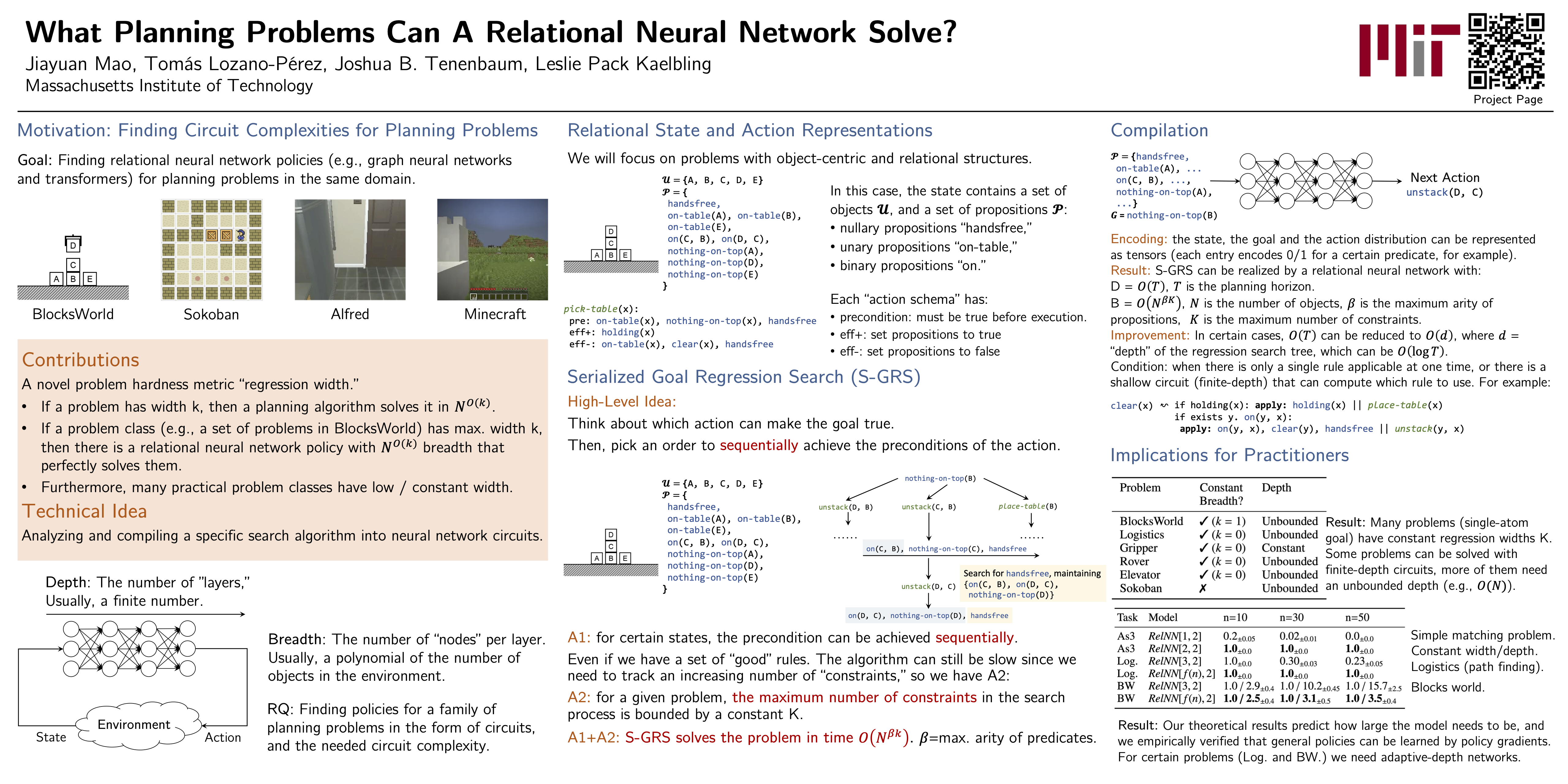
Goal-conditioned policies are generally understood to be "feed-forward" circuits, in the form of neural networks that map from the current state and the goal specification to the next action to take. However, under what circumstances such a policy can be learned and how efficient the policy will be are not well understood. In this paper, we present a circuit complexity analysis for relational neural networks (such as graph neural networks and transformers) representing policies for planning problems, by drawing connections with serialized goal regression search (S-GRS). We show that there are three general classes of planning problems, in terms of the growth of circuit width and depth as a function of the number of objects and planning horizon, providing constructive proofs. We also illustrate the utility of this analysis for designing neural networks for policy learning.