Learning Score-based Grasping Primitive for Human-assisting Dexterous Grasping
{kind=link}
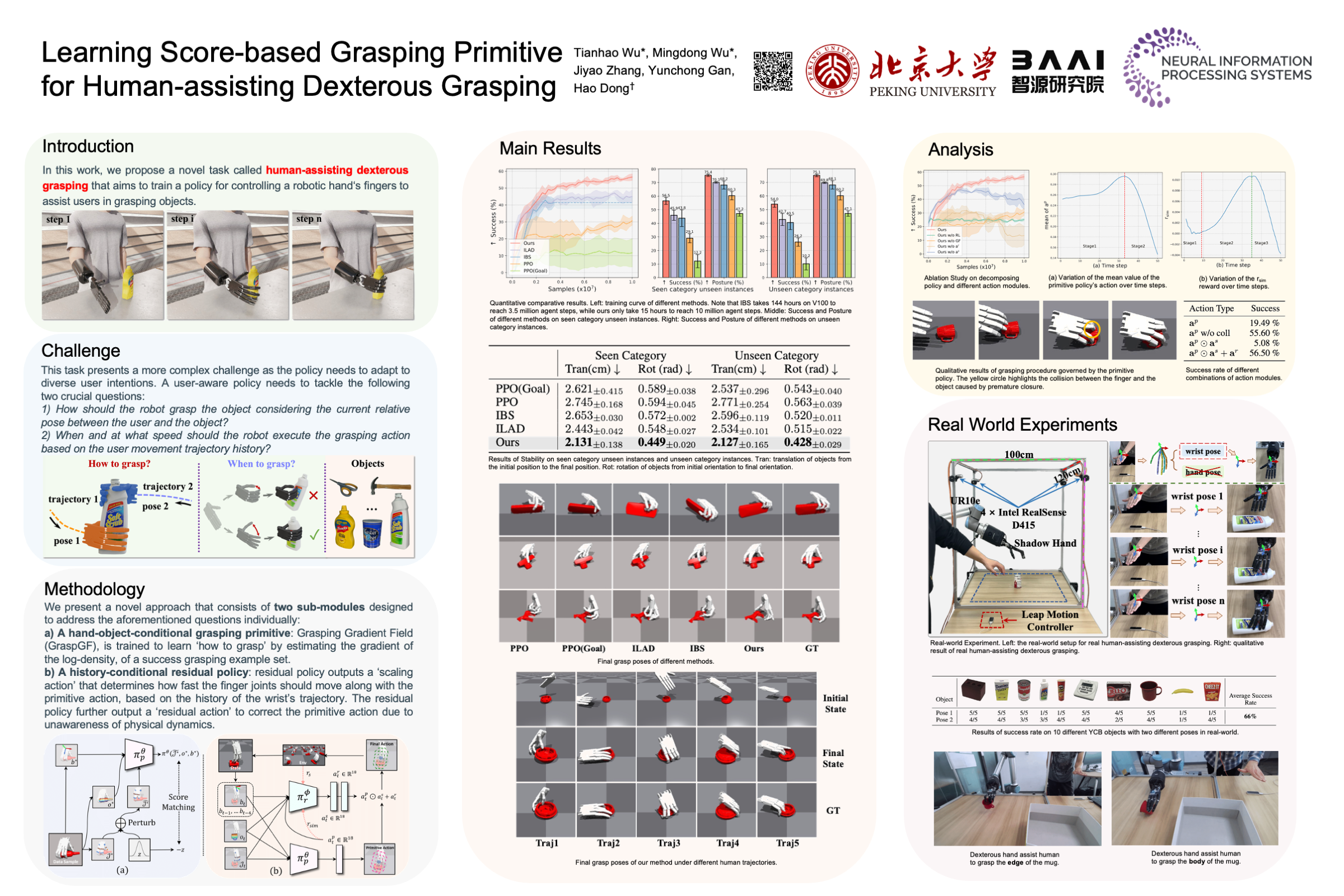
Abstract
The use of anthropomorphic robotic hands for assisting individuals in situations where human hands may be unavailable or unsuitable has gained significant importance. In this paper, we propose a novel task called human-assisting dexterous grasping that aims to train a policy for controlling a robotic hand's fingers to assist users in grasping objects. Unlike conventional dexterous grasping, this task presents a more complex challenge as the policy needs to adapt to diverse user intentions, in addition to the object's geometry. We address this challenge by proposing an approach consisting of two sub-modules: a hand-object-conditional grasping primitive called Grasping Gradient Field (GraspGF), and a history-conditional residual policy. GraspGF learns 'how' to grasp by estimating the gradient of a synthesised success grasping example set, while the residual policy determines 'when' and at what speed the grasping action should be executed based on the trajectory history. Experimental results demonstrate the superiority of our proposed method compared to baselines, highlighting the user-awareness and practicality in real-world applications. The codes and demonstrations can be viewed at https://sites.google.com/view/graspgf.