Learning Provably Robust Estimators for Inverse Problems via Jittering
Anselm Krainovic ⋅ Mahdi Soltanolkotabi ⋅ Reinhard Heckel
2023 Poster
{kind=link}
Abstract
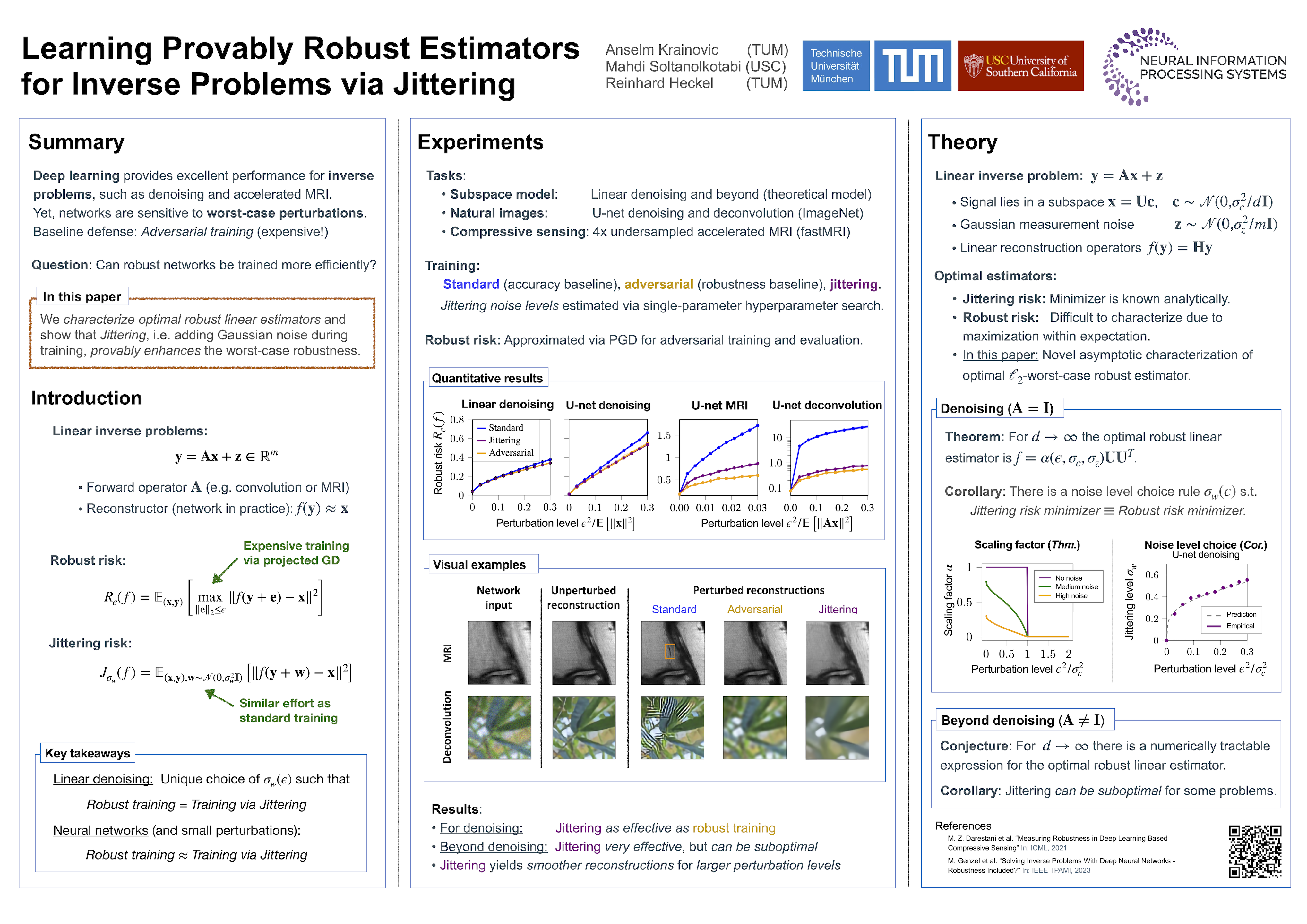
Deep neural networks provide excellent performance for inverse problems such as denoising. However, neural networks can be sensitive to adversarial or worst-case perturbations. This raises the question of whether such networks can be trained efficiently to be worst-case robust. In this paper, we investigate whether jittering, a simple regularization technique that adds isotropic Gaussian noise during training, is effective for learning worst-case robust estimators for inverse problems. While well studied for prediction in classification tasks, the effectiveness of jittering for inverse problems has not been systematically investigated. In this paper, we present a novel analytical characterization of the optimal $\ell_2$-worst-case robust estimator for linear denoising and show that jittering yields optimal robust denoisers. Furthermore, we examine jittering empirically via training deep neural networks (U-nets) for natural image denoising, deconvolution, and accelerated magnetic resonance imaging (MRI). The results show that jittering significantly enhances the worst-case robustness, but can be suboptimal for inverse problems beyond denoising. Moreover, our results imply that training on real data which often contains slight noise is somewhat robustness enhancing.
Video
Chat is not available.
Successful Page Load