Memory-Constrained Algorithms for Convex Optimization
Moise Blanchard ⋅ Junhui Zhang ⋅ Patrick Jaillet
2023 Poster
{kind=link}
Abstract
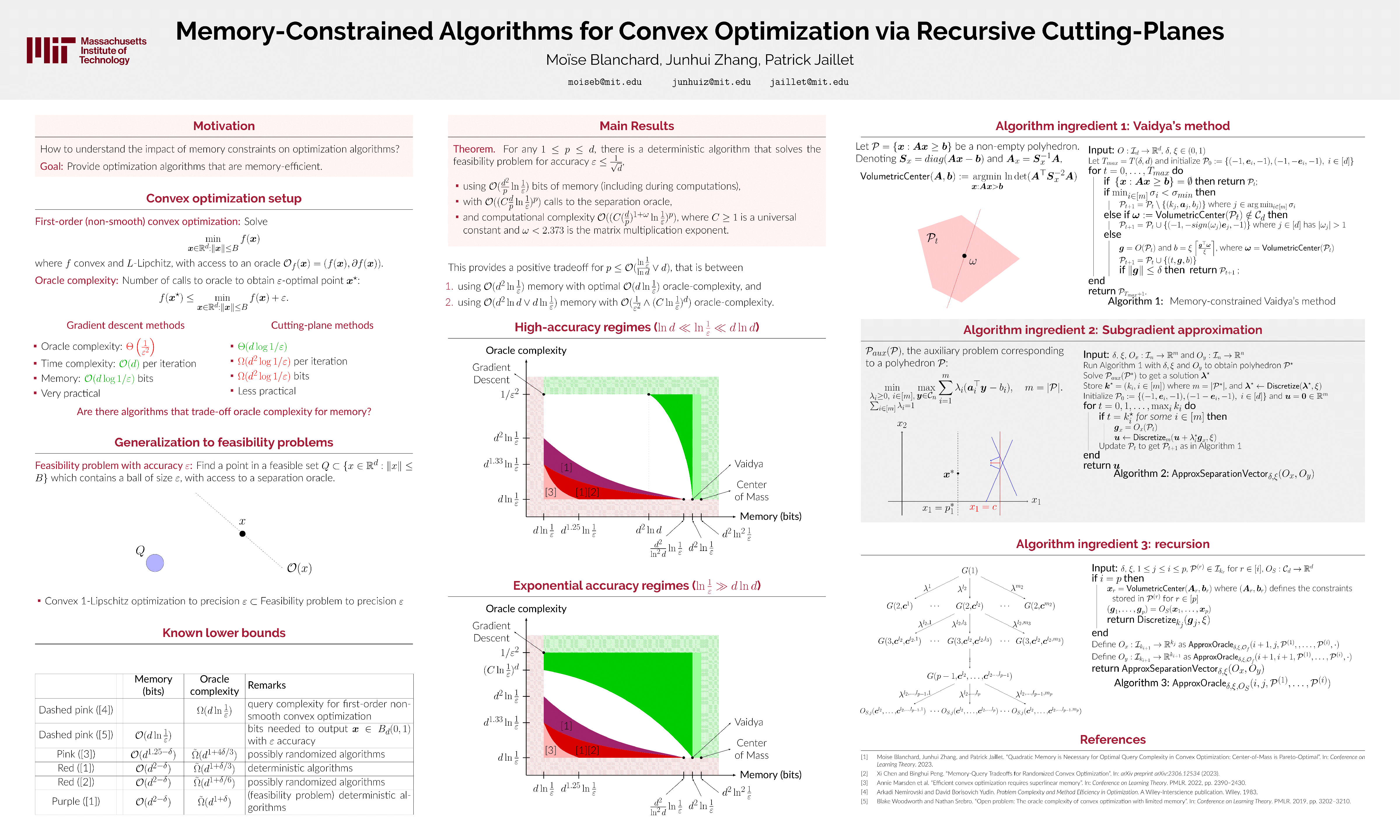
We propose a family of recursive cutting-plane algorithms to solve feasibility problems with constrained memory, which can also be used for first-order convex optimization. Precisely, in order to find a point within a ball of radius $\epsilon$ with a separation oracle in dimension $d$---or to minimize $1$-Lipschitz convex functions to accuracy $\epsilon$ over the unit ball---our algorithms use $\mathcal O(\frac{d^2}{p}\ln \frac{1}{\epsilon})$ bits of memory, and make $\mathcal O((C\frac{d}{p}\ln \frac{1}{\epsilon})^p)$ oracle calls. The family is parametrized by $p\in[d]$ and provides an oracle-complexity/memory trade-off in the sub-polynomial regime $\ln\frac{1}{\epsilon}\gg\ln d$. While several works gave lower-bound trade-offs (impossibility results)---we explicit here their dependence with $\ln\frac{1}{\epsilon}$, showing that these also hold in any sub-polynomial regime---to the best of our knowledge this is the first class of algorithms that provides a positive trade-off between gradient descent and cutting-plane methods in any regime with $\epsilon\leq 1/\sqrt d$. The algorithms divide the $d$ variables into $p$ blocks and optimize over blocks sequentially, with approximate separation vectors constructed using a variant of Vaidya's method. In the regime $\epsilon \leq d^{-\Omega(d)}$, our algorithm with $p=d$ achieves the information-theoretic optimal memory usage and improves the oracle-complexity of gradient descent.
Video
Chat is not available.
Successful Page Load