Probabilistic inverse optimal control for non-linear partially observable systems disentangles perceptual uncertainty and behavioral costs
{kind=link}
Abstract
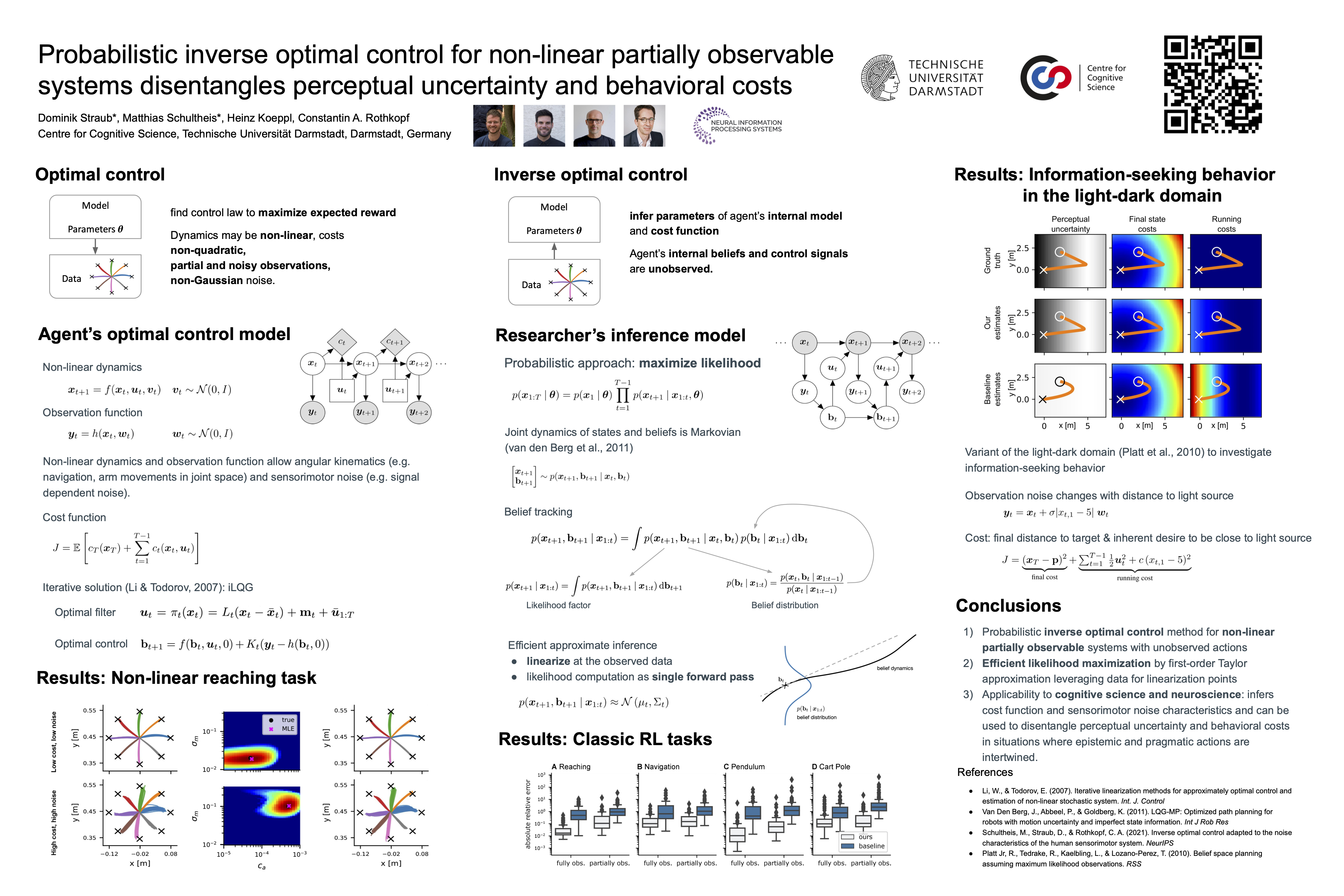
Inverse optimal control can be used to characterize behavior in sequential decision-making tasks. Most existing work, however, is limited to fully observable or linear systems, or requires the action signals to be known. Here, we introduce a probabilistic approach to inverse optimal control for partially observable stochastic non-linear systems with unobserved action signals, which unifies previous approaches to inverse optimal control with maximum causal entropy formulations. Using an explicit model of the noise characteristics of the sensory and motor systems of the agent in conjunction with local linearization techniques, we derive an approximate likelihood function for the model parameters, which can be computed within a single forward pass. We present quantitative evaluations on stochastic and partially observable versions of two classic control tasks and two human behavioral tasks. Importantly, we show that our method can disentangle perceptual factors and behavioral costs despite the fact that epistemic and pragmatic actions are intertwined in sequential decision-making under uncertainty, such as in active sensing and active learning. The proposed method has broad applicability, ranging from imitation learning to sensorimotor neuroscience.