CaMP: Causal Multi-policy Planning for Interactive Navigation in Multi-room Scenes
{kind=link}
Abstract
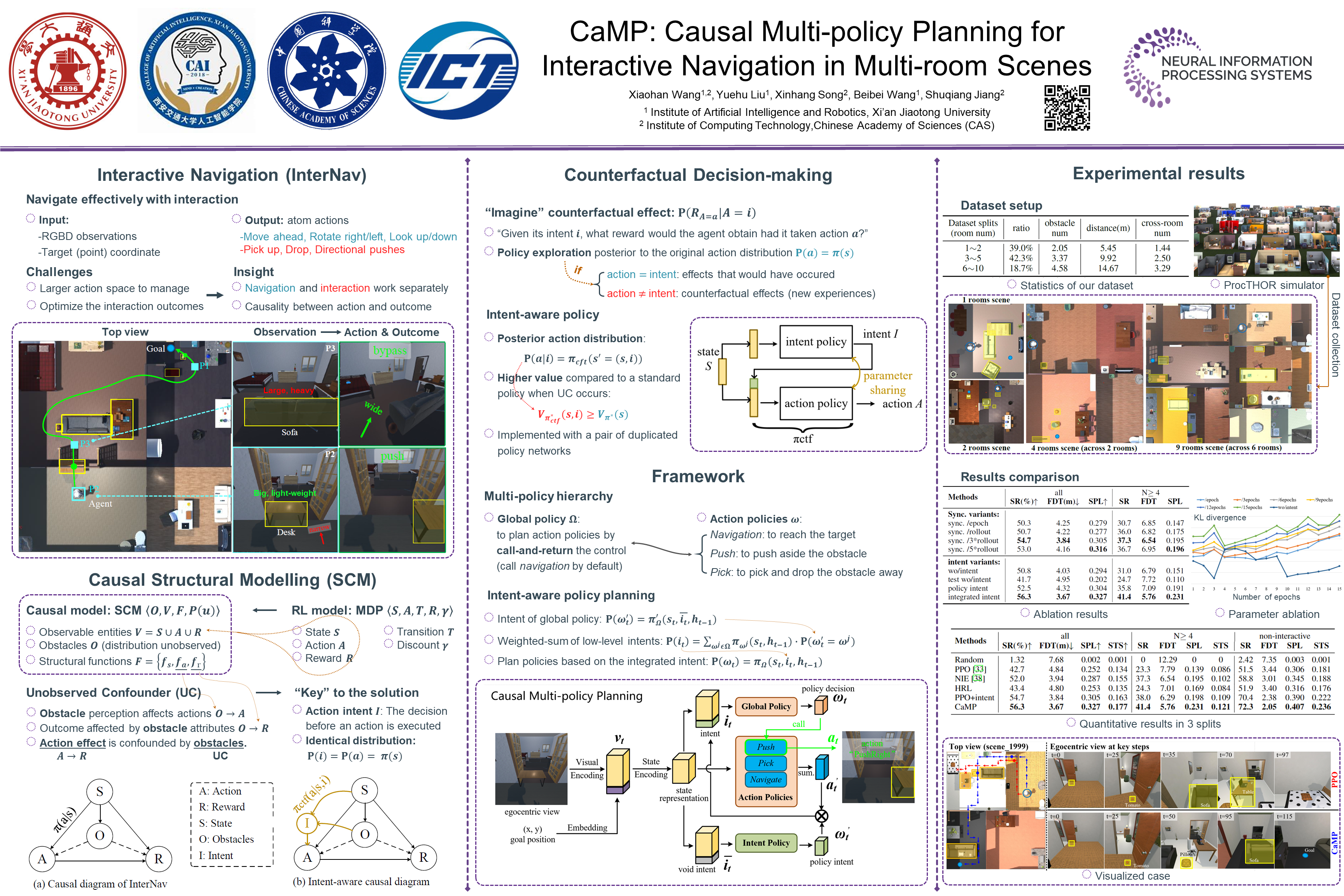
Visual navigation has been widely studied under the assumption that there may be several clear routes to reach the goal. However, in more practical scenarios such as a house with several messy rooms, there may not. Interactive Navigation (InterNav) considers agents navigating to their goals more effectively with object interactions, posing new challenges of learning interaction dynamics and extra action space. Previous works learn single vision-to-action policy with the guidance of designed representations. However, the causality between actions and outcomes is prone to be confounded when the attributes of obstacles are diverse and hard to measure. Learning policy for long-term action planning in complex scenes also leads to extensive inefficient exploration. In this paper, we introduce a causal diagram of InterNav clarifying the confounding bias caused by obstacles. To address the problem, we propose a multi-policy model that enables the exploration of counterfactual interactions as well as reduces unnecessary exploration. We develop a large-scale dataset containing 600k task episodes in 12k multi-room scenes based on the ProcTHOR simulator and showcase the effectiveness of our method with the evaluations on our dataset.