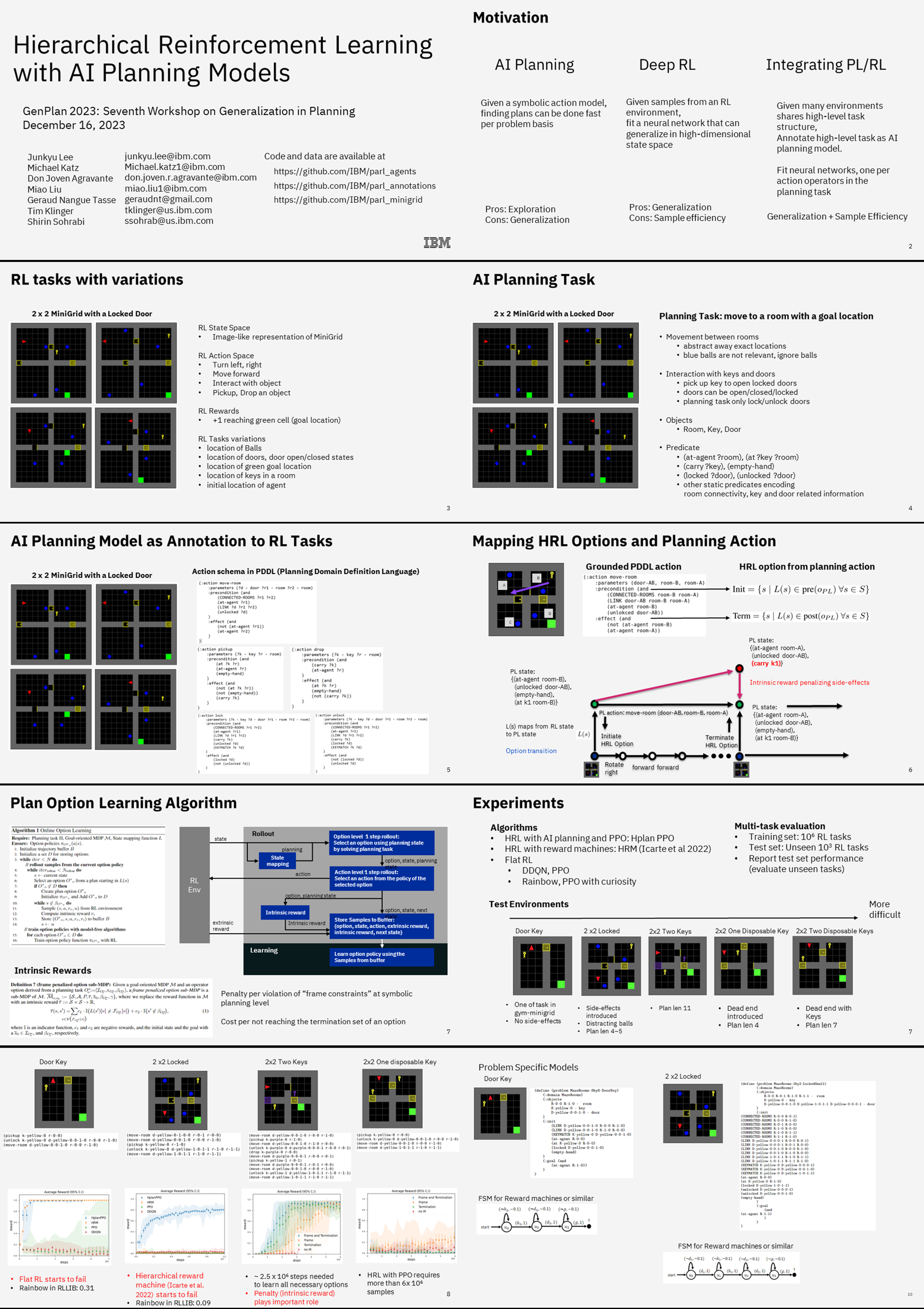
Hierarchical Reinforcement Learning with AI Planning Models
in
Workshop: Generalization in Planning (GenPlan '23)
{kind=link}
Abstract
Deep Reinforcement Learning (DRL) has shown breakthroughs in solving challenging problems, such as pixel-based games and continuous control tasks. In complex environments, infusing prior domain knowledge is essential to achieve sample efficiency and generalization.Neuro-symbolic AI seeks systematic domain knowledge infusion into neural network-based learning, and existing neuro-symbolic approaches for sequential decision-making leverage hierarchical reinforcement learning (HRL) by infusing symbolically specified prior knowledge on desired trajectories.However, this requires finding symbolic solutions in RL environments before learning, and it is difficult to handle the divergence between unknown RL dynamics and prior knowledge. Such shortcomings result in loose and manual neuro-symbolic integration and degrade the generalization capability.In this paper, we integrate the options framework in HRL with an AI planning model to resolve the shortcomings in earlier approaches and generalize beyond RL environments where pre-specified partial solutions are valid.Our approach defines options from AI planning operators by establishing the connection between the two transition systems in the options framework and the AI planning task. Then, we show an option policy learning method that integrates an AI planner and model-free DRL algorithms with intrinsic rewards, encouraging consistency between the two transition systems. We design a suite of MiniGrid environments that cover the increasing levels of difficulties in exploration, where our empirical evaluation clearly shows the advantage of HRL with AI planning models.