A$^2$Nav: Action-Aware Zero-Shot Robot Navigation Using Vision-Language Ability of Foundation Models
Peihao Chen ⋅ Xinyu Sun ⋅ Hongyan Zhi ⋅ Runhao Zeng ⋅ Thomas Li ⋅ Mingkui Tan ⋅ Chuang Gan
{kind=link}
Abstract
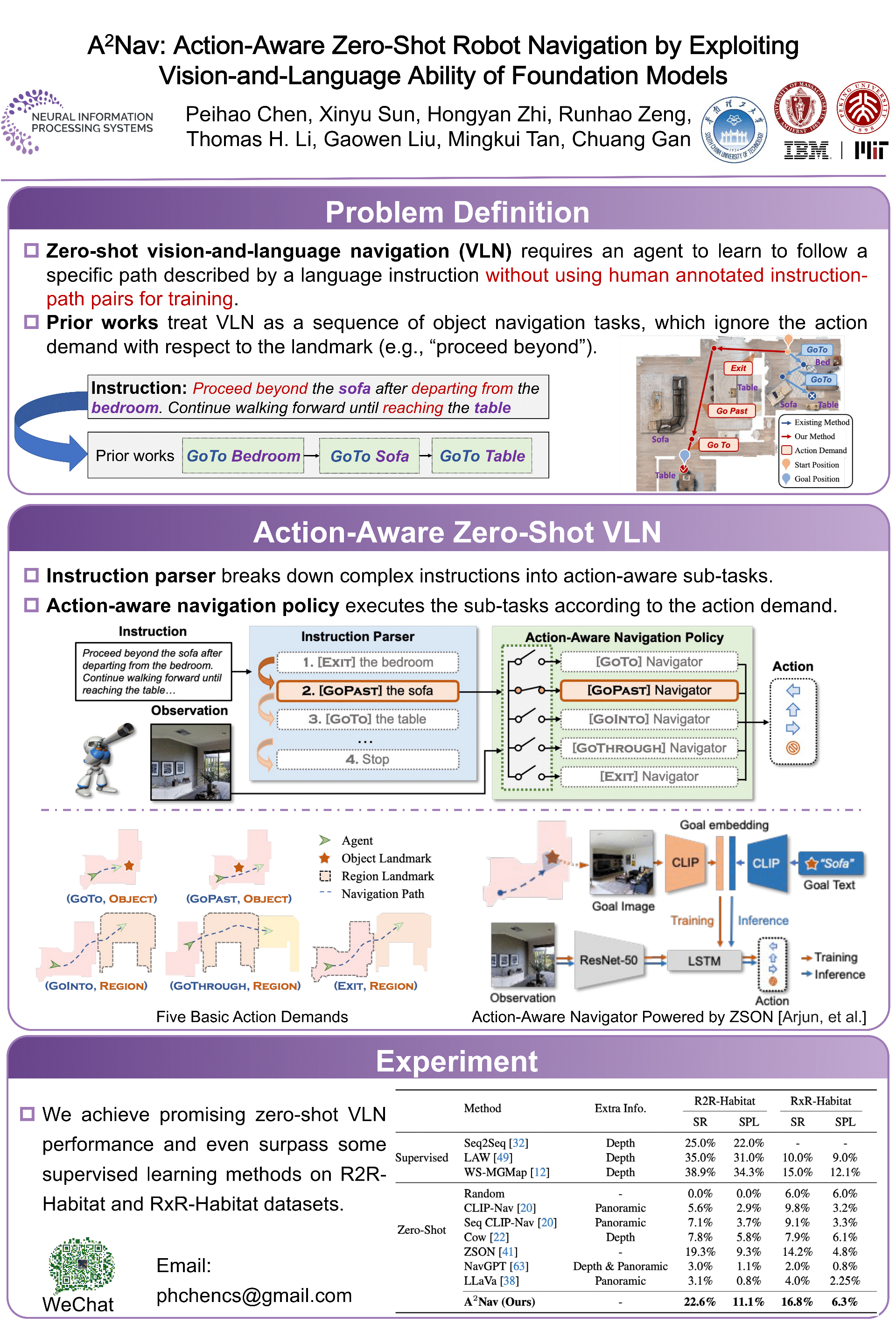
We tackle the challenging task of zero-shot vision-and-language navigation (ZS-VLN), where an agent learns to follow complex path instructions without annotated data. We introduce A$^2$Nav, an action-aware ZS-VLN method leveraging foundation models like GPT and CLIP. Our approach includes an instruction parser and an action-aware navigation policy. The parser breaks down complex instructions into action-aware sub-tasks, which are executed using the learned action-specific navigation policy. Extensive experiments show A$^2$Nav achieves promising ZS-VLN performance and even surpasses some supervised learning methods on R2R-Habitat and RxR-Habitat datasets.
Chat is not available.
Successful Page Load