Accelerating Motion Planning via Optimal Transport
{kind=link}
Abstract
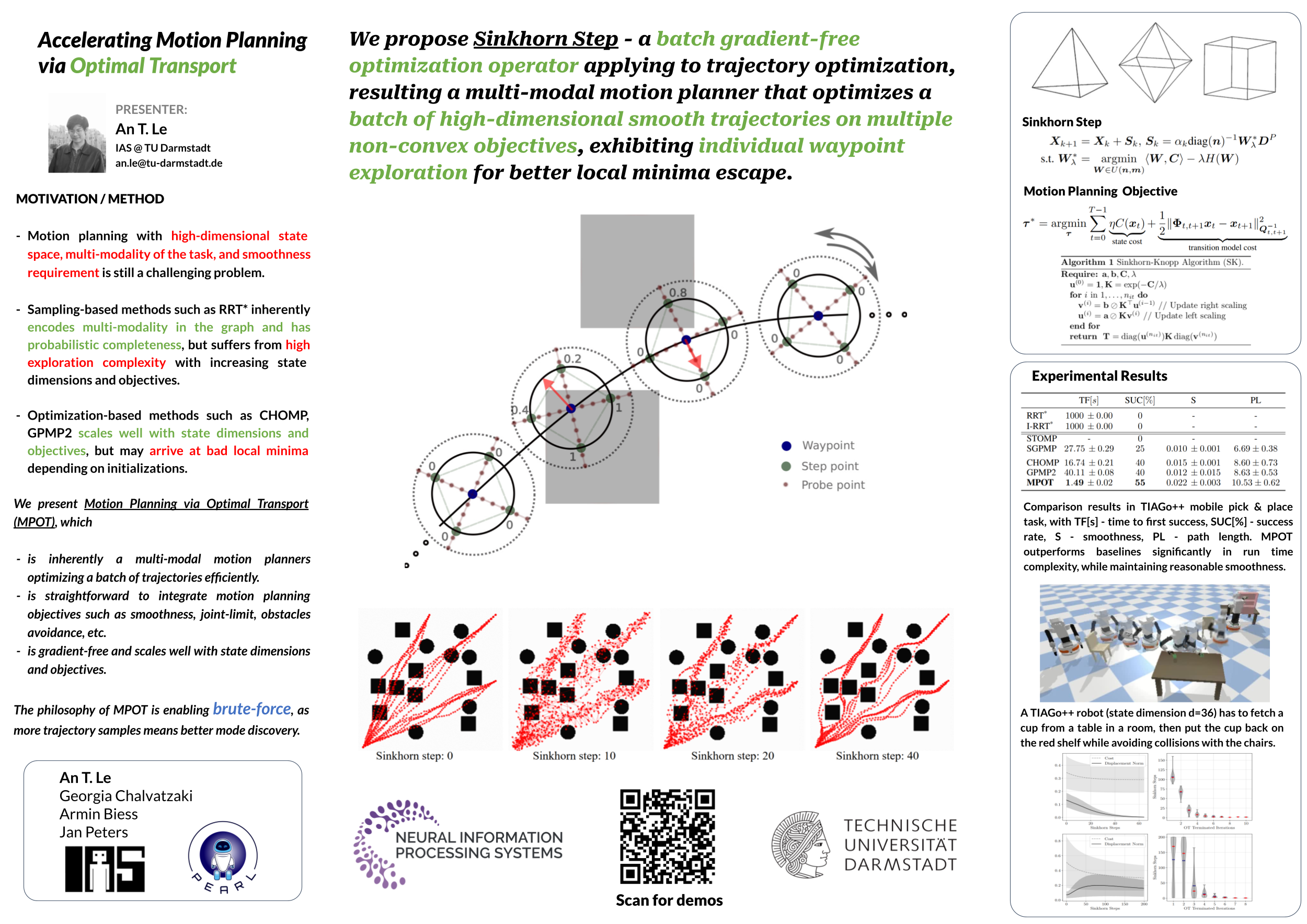
Motion planning is still an open problem for many disciplines, e.g., robotics, autonomous driving, due to issues like high planning times that hinder real-time, efficient decision-making. A class of methods striving to provide smooth solutions is gradient-based trajectory optimization. However, those methods might suffer from bad local minima, while for many settings, they may be inapplicable due to the absence of easy access to objectives-gradients. In response to these issues, we introduce Motion Planning via Optimal Transport (MPOT) - a \textit{gradient-free} method that optimizes a batch of smooth trajectories over highly nonlinear costs, even for high-dimensional tasks, while imposing smoothness through a Gaussian Process dynamics prior via planning-as-inference perspective. To facilitate batch trajectory optimization, we introduce an original zero-order and highly-parallelizable update rule -- the Sinkhorn Step, which uses the regular polytope family for its search directions; each regular polytope, centered on trajectory waypoints, serves as a local neighborhood, effectively acting as a trust region, where the Sinkhorn Step ``transports'' local waypoints toward low-cost regions. We theoretically show that Sinkhorn Step guides the optimizing parameters toward local minima regions on non-convex objective functions. We then show the efficiency of MPOT in a range of problems from low-dimensional point-mass navigation to high-dimensional whole-body robot motion planning, evincing its superiority compared with popular motion planners and paving the way for new applications of optimal transport in motion planning.