Poster
in
Workshop: Deep Reinforcement Learning Workshop
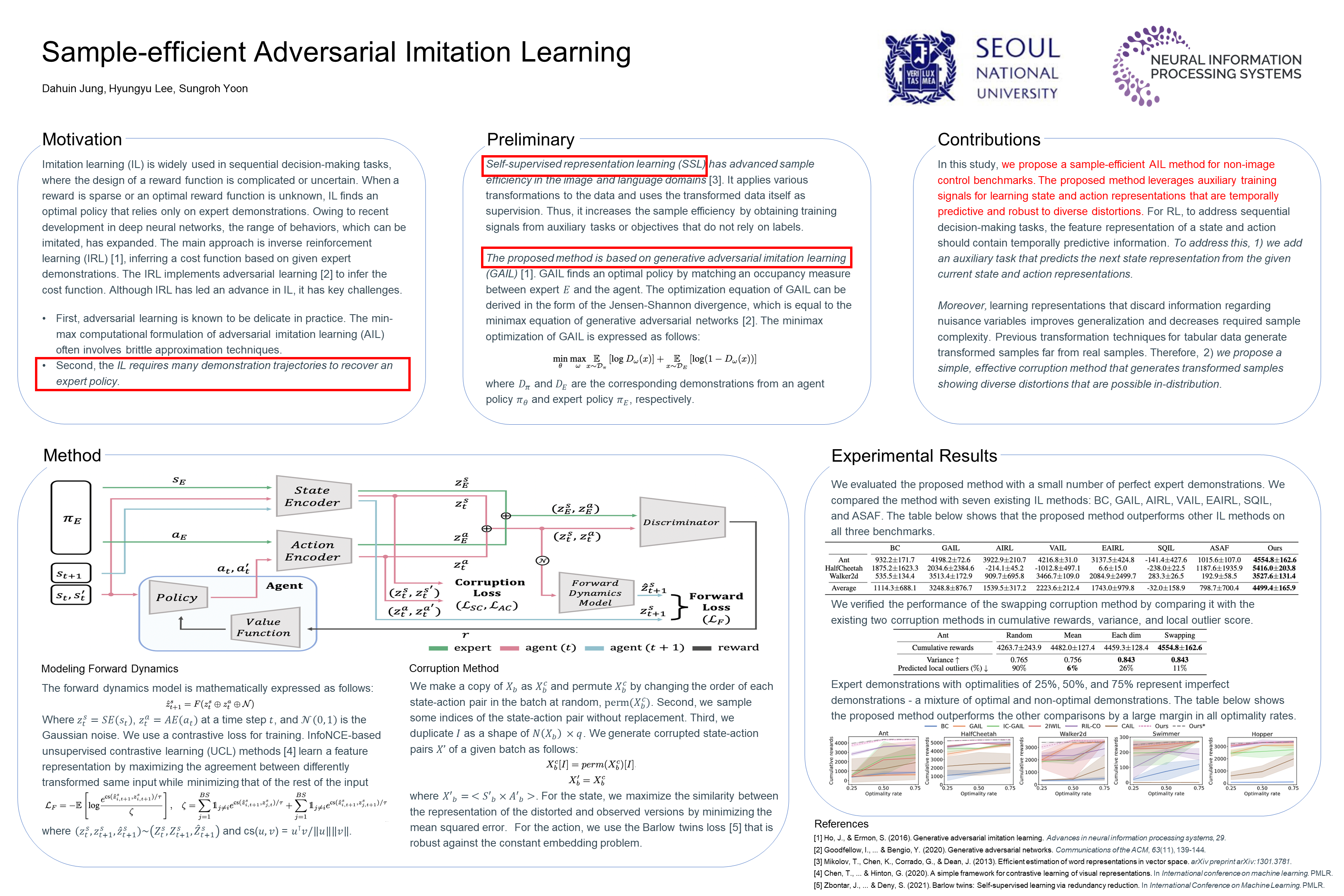
Sample-efficient Adversarial Imitation Learning
Dahuin Jung · Hyungyu Lee · Sungroh Yoon
{kind=link}
Imitation learning, wherein learning is performed by demonstration, has been studied and advanced for sequential decision-making tasks in which a reward function is not predefined. However, imitation learning methods still require numerous expert demonstration samples to successfully imitate an expert's behavior. To improve sample efficiency, we utilize self-supervised representation learning, which can generate vast training signals from the given data. In this study, we propose a self-supervised representation-based adversarial imitation learning method to learn state and action representations that are robust to diverse distortions and temporally predictive, on non-image control tasks. Particularly, in comparison with existing self-supervised learning methods for tabular data, we propose a different corruption method for state and action representations robust to diverse distortions. The proposed method shows a 39% relative improvement over the existing adversarial imitation learning methods on MuJoCo in a setting limited to 100 expert state-action pairs. Moreover, we conduct comprehensive ablations and additional experiments using demonstrations with varying optimality to provide the intuitions of a range of factors.