Poster
in
Workshop: Deep Reinforcement Learning Workshop
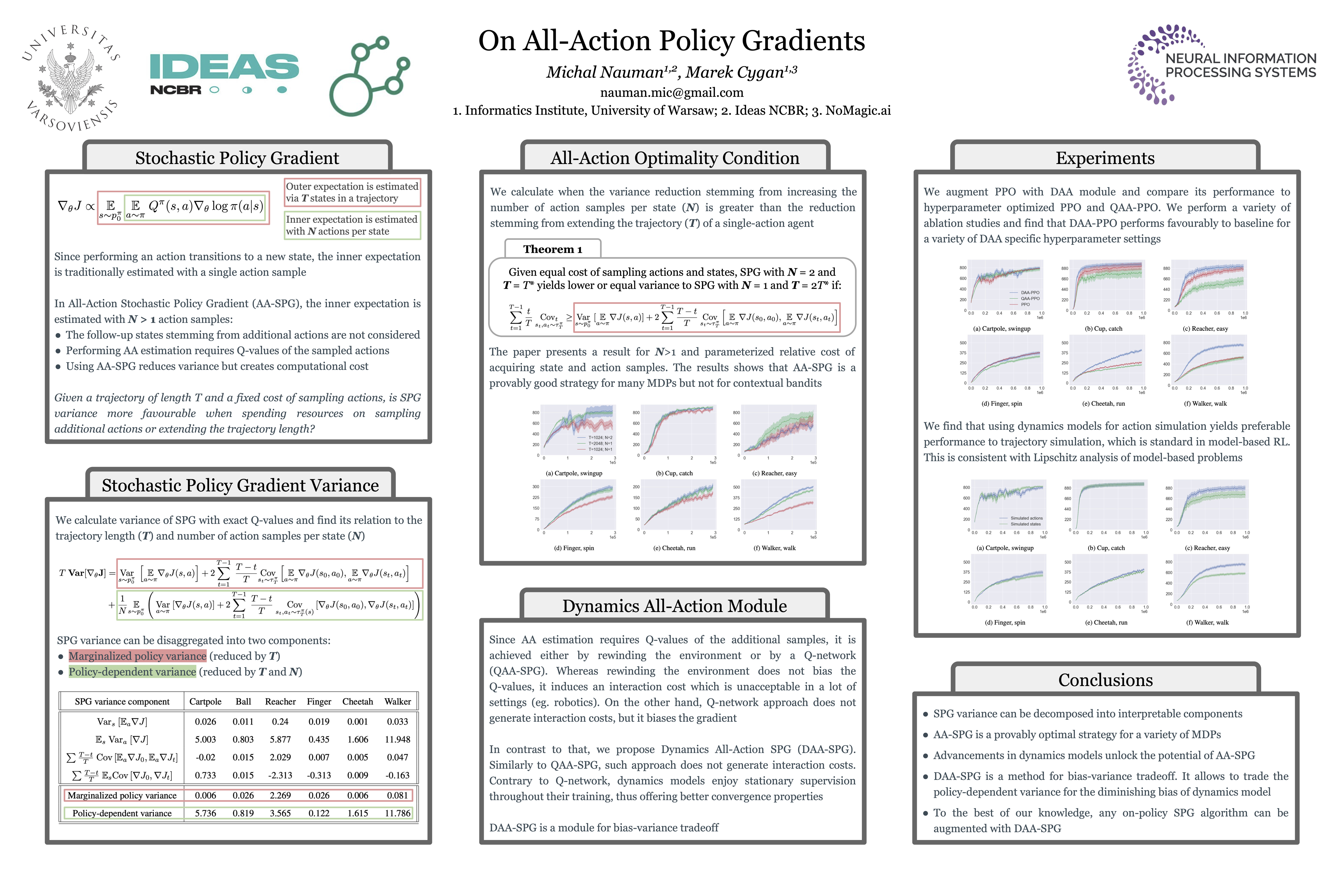
On All-Action Policy Gradients
Michal Nauman · Marek Cygan
{kind=link}
In this paper, we analyze the variance of stochastic policy gradient with many action samples per state (all-action SPG). We decompose the variance of SPG and derive an optimality condition for all-action SPG. The optimality condition shows when all-action SPG should be preferred over single-action counterpart and allows to determine a variance-minimizing sampling scheme in SPG estimation. Furthermore, we propose dynamics-all-action (DAA) module, an augmentation that allows for all-action sampling without manipulation of the environment. DAA addresses the problems associated with using a Q-network for all-action sampling and can be readily applied to any on-policy SPG algorithm. We find that using DAA with a canonical on-policy algorithm (PPO) yields better sample efficiency and higher policy returns on a variety of challenging continuous action environments.